|
|
Ультразвуковой эхолот для поиска пустот в земле
Предисловие.
 На написание этой статьи ушло два года. Изначально она не была предназначена для публикации, а писалась «для себя». На написание этой статьи ушло два года. Изначально она не была предназначена для публикации, а писалась «для себя».
Начиная серьёзную разработку, надо было изучить достижения мировой науки и практики, чтобы «не изобретать велосипед». И, чтобы проведённая работа не потерялась во времени, я начал конспектировать основные положения и выводы, сделанные в результате изучения мировых достижений. Оказалось, что в открытых источниках никакой информации конкретно по изделию нет, хотя расследование показало теоретическую возможность его работоспособности. И вообще: аналогичное изделие даже не упоминается. Единственным убогим аналогом могли служить эхолоты для рыбалки.
Далее появилось много идей. И, чтобы не забыть наиболее продуктивные из них, их я тоже стал описывать. А также сначала стал разрабатывать нормальную документацию, и только потом приступать к изготовлению опытных образцов. Это сэкономило много времени, поскольку множество ошибок было обнаружено в процессе проектирования. Кроме того, описывалась мотивация принятых решений, чтобы в будущем вспомнить, почему сделано так, а не иначе.
В результате появилась статья, которую можно назвать «Дневник разработки». То есть, в ней показан весь путь рождения изделия от идеи до последнего варианта готового образца. Она может быть полезна для обучения начинающим разработчикам. Если кого интересует только результат, нужно начинать читать с конца, с описания последнего варианта.
Кроме того, хочу облегчить жизнь людям, желающим продолжить начатое дело. И даже тем, кто захочет заняться его производством.
Мне иногда задают вопрос: - Почему я не побежал что-то патентовать, и даже наоборот, выкладываю свои идеи на общее обозрение. Объясняю.
При внимательном рассмотрении оказывается, что существующее патентное право предназначено не для развития, а, прежде всего, для тормоза нашего прогресса и изымания денег, потому, что за патент надо платить. К тому же, Ваш патент, скорее всего, никто не купит, и он погибнет в архивах Истории. А когда придёт время опубликования, его просто обойдут, и денег Вы всё равно не получите, благо, патентная система это позволяет.
А если я опубликовал какую-то идею, она доступна всем желающим. Вот только патент на неё выдавать патентное бюро не имеет права, поскольку она ранее опубликована и главный признак изобретения - новизна, отсутствует.
Отдельную благодарность хочу выразить нашим китайским друзьям с Алиэкспресс. Они за приемлемые деньги обеспечили мне доступ к результатам передовых технологий всего мира. К сожалению, на отечественной элементной базе такую разработку я бы не осилил. Наверное, не ошибусь, если скажу, что Алиэкспресс материально обеспечивает и стимулирует народное творчество. По крайней мере, в нашей стране.
1. Вводная часть. Обзор Интернета и эксперименты.
Всем известны эхолоты для использования в водоёмах. В то же время, для исследования грунта используются преимущественно георадары. Возникает вопрос: - Что мешает использовать эхолот в грунте? Интуитивно приходит ответ, что в грунте слишком большое затухание сигнала и эхолот окажется неэффективным.
А что говорит Интернет?
Вот, напрмер: https://studopedia.ru/3_124284_akusticheskie-svoystva-porod.html
Цитата:
«Скорость распространения упругих волн в горных породах зависит от их упругих свойств и плотности и практически не зависит от частоты колебаний (что позволяет использовать для исследований любые частоты колебаний)».
«Для плоской волны (фронт – плоскость) изменение амплитуды волны А в соответствии с пройденным расстоянием Х определяется экспоненциальным законом:
A = A0*e-qX,
где А – текущая амплитуда (по координате Х); А0 – начальная амплитуда (при Х=0); q - коэффициент поглощения упругих волн горной породой, м-1.
Коэффициент поглощения упругих колебаний q зависит от физических (упругих, тепловых и др.) свойств пород и от частоты колебаний f.
Эксперименты показывают, что для большинства горных пород зависимость q от частоты f – линейная, для глинистых пород коэффициент q пропорционален Lgf.»
Например, для песчаника, часто встречающегося грунта, q = 0,264 м-1
(на какой частоте, не указано).
Рассчитаем, каким будет затухание на расстоянии 10 м.
A = A0*eqX, = A0*e-0,264*10 = A0*e-2,64 = , A0*0,071 = A0/14.
Многовато, конечно, тем более, что отражённый сигнал опять ослабится в 14 раз. Всего в 196 раз. И ещё надо умножить на коэффициент отражения. Забегая вперёд, скажу, что в поставленном эксперименте с приёмника, расположенного в 2-х см от импульсного излучателя мощностью в 30 Вт был получен сигнал амплитудой 400 мВ. Если ослабить его в 200 раз, будет 2 мВ. Реально удалось построить усилитель, который имеет чувствительность 15 мкВ. Это в 133 раза меньше. И получается, что 10 м в песчанике не предел.
На самом деле всё не так плохо. Песок - это, можно считать, худший случай.
В источнике: https://bookonlime.ru/node/748 приводятся сведения о поглощении различных грунтов.
Цитата:
«Коэффициент поглощения различен для разных пород и возрастает с ростом пористости, трещиноватости пород, с уменьшением глубины их залегания и водонасыщенности. В среднем у изверженных, метаморфических и сцементированных осадочных пород q = 10–5–10–3 (1/м), у рыхлых осадочных q = 10–3– 0,5 (1/м). Кроме того, коэффициент поглощения зависит от частоты сигнала: он возрастает с увеличением частоты, приблизительно с линейной зависимостью».
Это обнадёживает. Не вижу причин отвергать эхолокацию для поиска пустот в земле. Имеет смысл продолжить разработку. Но первый вывод напрашивается сам:
Серийно выпускаемые эхолоты, предназначенные для воды, непригодны для локации в грунте. Во-первых, потому, что работают на высоких частотах, порядка 200 КГц. Поглощение звука будет раз в 10 выше, чем на частоте 20 КГц и в 5 раз больше, чем на частоте 40 КГц. Во-вторых, потому, что у них излучатель не приспособлен для контакта с грунтом.
В этом же источнике приведены скорости распространения звуковых волн в различных грунтах (таблица 1). Они нам понадобятся при расчёте параметров устройства.
Таблица 1.1. Типичные значения скоростей продольных и поперечных волн и значения плотности для некоторых типов горных пород
|
Порода или среда
|
Vp, км/с
|
Vs, км/с
|
σ, г/см3
|
|
Воздух
|
0,3–0,35
|
—
|
0,001
|
|
Вода
|
1,4–1,6
|
—
|
1,0
|
|
Нефть
|
1,3–1,4
|
—
|
0,8–1,0
|
|
Сухие пески, суглинки, галька, гравий, щебень
|
0,3–0,8
|
0,1–0,4
|
1,2–1,7
|
|
Водонасыщенные пески, суглинки, галька, гравий, щебень
|
1,3–1,8
|
0,1–0,5
|
1,6–2,0
|
|
Глина влажная
|
1,4–2,5
|
0,4–0,6
|
1,6–2,0
|
|
Песчаник
|
1,8–4,0
|
0,7–2,1
|
1,8–2,9
|
|
Мергель
|
2,0–3,5
|
0,3–1,8
|
2,3–2,8
|
|
Известняк, доломит
|
2,5–6,0
|
1,2–3,5
|
1,8–3,0
|
|
Лед, мерзлые водонасыщенные пески и глины
|
3,2–4,0
|
1,6–2,1
|
0,9–1,6
|
|
Гранит
|
4,0–5,7
|
1,8–3,5
|
2,5–2,7
|
|
Метаморфические породы
|
4,5–6,8
|
2,4–3,8
|
2,6–3,2
|
|
Габбро
|
6,0–7,0
|
3,2–3,7
|
2,8–3,1
|
|
Перидотит
|
7,8–8,2
|
4,1–4,5
|
2,9–3,3
|
Здесь Vp - скорость продольной волны, Vs - скорость поперечной волны, σ - плотность.
В будущем полезной может оказаться следующая цитата:
«Самая верхняя часть разреза горных пород обычно представлена рыхлыми, слабосцементированными отложениями. Это почвенный слой и подстилающие его выветрелые, слабоуплотненные породы. Они обладают малыми скоростями распространения волн и называются зоной малых скоростей (ЗМС)… В эту зону относят слои со скоростями (Vp), изменяющимися от 600–800 до 1200–1500 м/с… Обычно мощность ЗМС изменяется от 10 до 20 м… Подошва ЗМС является достаточно резкой границей. Возвращающиеся к свободной поверхности после отражения и преломления на глубокозалегающих границах раздела волны встречают подошву ЗМС и претерпевают на ней интенсивное отражение, превосходящее подчас отражение от земной поверхности… Породы, слагающие ЗМС, обладают наиболее высокими коэффициентами поглощения упругих волн. В результате этого заметно уменьшается амплитуда колебаний и форма импульса».
Отсюда следует вывод, что при эхолокации необходимо научиться различать сигналы от подошвы и искомого предмета.
2. Выбор излучателя и приёмника.
Обзор и испытания доступных ультразвуковых излучателей и приёмников проведён в отдельной статье «Исследование проблем использования пьезодатчиков в дальномерах и эхолотах и способов их решения».
2.1. Излучатель
Излучатель должен быть крепким, потому, что его придётся сильно прижимать к земле. Поискал на просторах Алиэкспресс и нашёл вот такие:
Рис. 1. Излучатель 40 КГц, 60 Вт и пластина 40 КГц, 35 Вт.
Данных на излучатель я не нашёл. Но несколько излучателей c таким же пьезоэлементом имеют похожие характеристики. Технические характеристики одного из них приведены в таблице 2.1. Характеристики пластины приведены в таблице 2.2.
Таблица 2.1. Технические характеристики излучателя.
|
Модель
|
Длина, мм
|
Вес,
г
|
Частота, КГц
|
Резонансный импеданс, Ом
|
Статическая ёмкость,
пФ, ± 10%
|
Входная мощность, Вт
|
|
CCH-4938D-40LAPZT-8
|
55
|
300
|
40
|
10-20
|
3800
|
60
|
Измеренная статическая ёмкость 3680 пФ, вес - 305 г.
Таблица 2.2. Технические характеристики пьезокерамической пластины.
|
Толщина,
мм
|
Диаметр, мм
|
Вес,
г
|
Частота, КГц
|
Резонансный импеданс, Ом
|
Статическая ёмкость,
пФ, ± 10%
|
Входная мощность, Вт
|
|
2,6
|
50
|
38
|
40
|
10-20
|
8500
|
35
|
Измеренные значения ёмкости и веса соответствуют табличным.
Чертёж первого излучателя приведён на рисунке 2.
Рис. 2. Чертёж излучателя.
Попытаемся осмыслить суть такой конструкции.
Материал, из которого сделана передняя часть излучателя, - алюминий, тыльная часть - сталь. Скорость нормальной волны звука в алюминии Vaн = 5000 м/с, в стали Vсн = 5180 м/с. (Нормальная волна, это волна, возникающая в самом образце, например, при резонансе и отражениях внутри образца).
Длина нормальной волны на частоте f = 40 КГц в алюминии:
Λaн = Vaн/f = 5000/40000 = 0,125 м = 125 мм,
в стали:
Λсн = Vсн/f = 5180/40000 = 0,1295 м = 129,5 мм,
Четверть волны в алюминии:
Λaн/4 = 125/4 = 31,25 мм,
в стали:
Λaн/4 = 129,5/4 = 32,37 мм,
Видим, что передняя часть конструкции имеет длину, с большой точностью равную четверти нормальной волны, а задняя часть - длину, близкую к одной восьмой части длины волны, если началом отсчёта считать середину пьезоэлемента.
Передняя накладка называется излучающей и служит для согласования волновых сопротивлений пьезоэлемента и нагрузки, которой в нашем случае является вода, поскольку излучатель предназначен для ультразвуковой ванны.
Задняя накладка называется отражающей и служит для перенаправления волны с тыльной стороны пьезоэлемента в сторону излучения.
Пластина в чистом виде применена быть не может, требуется оснастка для крепления и гидроизоляции, поэтому сразу откажемся от неё.
2.2. Приёмник
Приёмником может служить и сам излучатель, вследствие обратимости пьезоэффекта. Но частота, на которой излучаемая энергия максимальна, у пьезоэлемента не совпадает с частотой, на которой максимальна чувствительность при приёме. Поэтому эффективность такого способа всегда ниже, чем при использовании отдельного пьезоэлемента в качестве приёмника, но только если резонансная частота приёмного пьезоэлемента близка к резонансной частоте излучателя.
Кроме всего прочего, в нашем случае приёмник, как и излучатель, должен быть достаточно прочным и изолирован от влаги. Таких излучателей на Алиэкспресс не много. Наиболее подходящими представляются только три, они показаны на рисунках 3-5.
2.2.1. Датчик EU16AIF40H12A

Рис. 3. Внешний вид датчика EU16AIF40H12A.
Ультразвуковой датчик, интегрированный приемопередатчик, диаметр 16 мм, водонепроницаемый.
Информация о продукте:
Номинальная частота, кГц: = 40.
- Эмиссионное звуковое давление при 10 В (0 дБ = 0,02 МПа): ≥ 110 дБ.
- Чувствительность при 40 КГц (0 дБ = 1 В/мкбар): ≥-75 дБ.
- Электростатическая емкость при 1 КГц, пФ = 1800, 30%.
2.2.2. Датчик EU18AIF40H07T/R

Рис. 4. Внешний вид датчика EU18AIF40H07T/R.
Ультразвуковой датчик, интегрированный приемопередатчик, диаметр 18 мм, водонепроницаемый.
Информация о продукте:
1. Номинальная частота, кГц: 40.
2. Эмиссионного звукового давления при 10 В (0 дБ = 0.02 мПа): 112 дБ.
3. Чувствительность приемника при 40 кГц (0 дБ = 1 В /мкбар): -70 дБ.
4. Ёмкость при 1 кГц, <1 В, (PF): 1800 30%.
2.2.3. Датчик EU25AIF40H12A
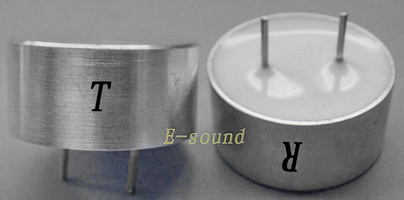
Рис. 5. Внешний вид датчика EU25AIF40H12A.
Ультразвуковой датчик, интегрированный приемопередатчик, диаметр 25 мм, водонепроницаемый.
Информация о продукте:
1. Номинальная частота, кГц: 40.
2. Звуковое давление при 10 В (0 дБ = 0,02 мПа): ≥ 116 дБ.
3. Чувствительность приема при 40 кГц (0dB = 1 В/мкбар): ≥-68 дБ.
4. Электростатическая емкость при 1 кГц, <1 В, (пФ): 1800 ± 30%.
Изучению этих датчиков и излучателей, как уже было написано, посвящена отдельная статья «Исследование проблем использования пьезодатчиков в дальномерах и эхолотах и способов их решения», поэтому здесь подробно останавливаться на датчиках не будем. Будем пользоваться результатами исследований, приведёнными в статье.
3. Ожидаемые возможности прибора
Очевидно, применение эхолота целесообразно только в воздухе, воде и в поверхностном слое - зоне малых скоростей (ЗМС), куда могут входить также влажная глина и водонасыщенные пески. Диапазон скоростей распространения продольной волны при этом будет лежать в пределах 300 - 2000 м/с. Причём, наиболее вероятный диапазон лежит в пределах 800 - 1600 м/с. Можно, конечно, поискать полости в песчанике со скоростью до 4000 м/с, которого много на земле, но вряд ли это будет иметь практический смысл, разве что, для поиска подземных пещер.
Максимальный диапазон соответствующих длин волн при этом составит:
- минимальная Λмин = 300/40000 = 0,0075 м = 7,5 мм = 0,75 см,
- максимальная Λмакс = 2000/40000 = 0,05 м = 50 мм = 5 см.
Наиболее вероятный диапазон:
- нижняя длина волны Λниж = 800/40000 = 0,02 м = 20 мм = 2 см,
- верхняя длина волны Λверх = 1600/40000 = 0,04 м = 40 мм = 4 см.
Это диапазон размеров тел, которые прибор не будет замечать. Волны просто обтекают предметы, меньшие, чем длина волны.
Заметим сразу, что в некоторых случаях возможны определение скорости звука в измеряемом грунте по нескольким контрольным замерам и соответствующая калибровка прибора.
Если излучатель используется также и для приёма отражённого сигнала, то надо иметь ввиду, что излучатель может быть переведён в режим приёма, когда закончится передача. После переключения в режим приёма должен быть обнаружен сигнал, отражённый от первого импульса. Если излучается N импульсов, то за время передачи волна распространится на N длин волны. При этом, первый отражённый импульс придёт от предмета, расположенного на расстоянии N/2 длины волны. Это и есть теоретически возможное минимальное «мёртвое» расстояние обнаружения прибора. На практике же, после выключения излучатель звенит в течение времени, сравнимого с длительностью пачки импульсов. Так что, это расстояние надо умножить на два.
Подсчитаем теоретически возможную минимальную длину мёртвой зоны для пачки из 8-ми импульсов, то есть, минимальное расстояние, на котором может быть обнаружен предмет, для предельных случаев:
- минимальная Lмин = 7,5*8/2 = 30 мм = (3 см)*2 = 6 см,
- максимальная Lмакс = 50*8/2 = 200 мм = (20 см)*2 = 40 см.
Если для приёма используется независимый датчик, минимальное расстояние обнаружения зависит только от расстояния между датчиком и излучателем.
Ну, а максимальное расстояние зависит от схемы приёмника, чувствительности приёмных датчиков и мощности излучателя.
4. Варианты конструкции прибора
4.1. Ограничения и способы их обхода
Самым главным ограничением является необходимость контакта с грунтом при измерениях. Если сканировать грунт через прослойку воздуха, из-за большой разницы плотности воздуха и грунта, подавляющая часть энергии будет отражаться от грунта, а что в грунте, мы и не увидим.
Ещё одна проблема – в согласовании параметров излучателя с параметрами грунта. Излучатель рассчитан на излучение в воду. Очевидно, вода и должна быть согласующим элементом между излучателем и грунтом. Например, если на грунте есть лужа, это самый хороший вариант. Если нет лужи, можно её сделать. Можно налить воду в воздушный шарик, а шарик положить на землю. При этом важно, чтобы шарик как можно более тесно соприкасался с поверхностью грунта. В этом плане наиболее качественный воздушный шарик, прочный, тонкий и эластичный продаётся в любой аптеке. Экспериментально установлено, что в него входит ведро воды до разрушения. Для ограничения размеров, шарик можно расположить в тонком капроновом чулке.
Скорость звука в воде примем равной 1500 м/с, что соответствует длине волны:
Λводы = 1500/40000 = 0,0375 м = 37,5 мм = 3,75 см.
Ограничением точности сканирования, например, простых эхолотов, является то, что энергия излучается не узким лучом, а в конусе. И отражённый сигнал, по крайней мере, в системах с совмещённым датчиком, говорит только о расстоянии до объекта и ничего не говорит о направлении на объект.
Для обхода этого ограничения можно выполнить совмещённый излучатель – приёмник в виде фазированной решётки и сканировать по принципу современных радиолокаторов. Но это сильно увеличивает габариты прибора, вызывает большие неудобства в работе и значительно удорожает конструкцию.
Если использовать один мощный излучатель, а приёмную часть выполнить в виде фазированной решётки, конструкция сильно упрощается и удешевляется.
А если отказаться от сканирования и настроить приёмник на приём только с одного направления – по фронту излучения, то количество элементов в приёмной фазированной решётке можно сильно уменьшить, схема становится совсем простой и дешёвой. Но тогда мы будем видеть только небольшое пятно по фронту излучения и придётся делать слишком много замеров, чтобы увидеть конфигурацию исследуемого объекта.
Решением проблемы может быть отказ от аппаратной реализации сканирования, а привлечение последних технических достижений. На Алиэкспресс имеется множество модулей гироскопов, акселерометров, датчиков атмосферного давления, движения, температуры и т. д. на любой вкус. Имеются несколько платформ типа Ардуино для реализации любых приборов на их основе.
В этом случае исполнительная часть прибора представляется в виде посоха, на нижней части которого установлены излучатель и приемная фазированная решётка, заключённые в согласующий шарик с водой или соприкасающиеся с ним всей своей поверхностью. Где-нибудь внутри посоха расположены датчики гироскопов и акселерометра, возможно и батарея. От посоха выходят несколько проводов (можно использовать и беспроводную связь), подключённых к какому-нибудь Ардуино, или другому компьютеру, расположенному, например, в рюкзаке. Полученные данные преобразуются и передаются на смартфон, расположенный в руке.
Процесс сканирования сводится к тому, что не прибор, а мы сами покачиваем посох в интересующем нас направлении, как будто светим фонариком, и смотрим на экране смартфона, что находится в грунте. Акселерометр и гироскопы отслеживают угол наклона и все перемещения посоха и вычисляют направление, откуда пришёл сигнал, отражая результат на экране.
Этот же вариант решает ещё одну проблему, которая заключается в том, что мы не можем волочить датчики по земле и автоматически считывать пройденное расстояние, как в геолокаторах, расположенных на тележке, за которой следует мерное колесо - датчик пройденного пути. Акселерометр с гироскопами позволяют рассчитать любое перемещение посоха по трём координатам и отразить весь путь без дополнительного мерного колеса.
Например, если нам надо отсканировать внутренности холма, мы, как простые туристы, проходим весь холм от подножия до вершины и далее на другую сторону холма. В одной руке у нас посох, в другой телефон, а за спиной рюкзак. Делая очередной шаг, мы устанавливаем посох перпендикулярно поверхности холма, нажимаем кнопку на посохе, покачиваем его в направлении движения и обратно. После окончания пути, наблюдаем на экране контуры холма и его поперечное сечение.
4.2. Параметры и конструкция приёмной фазированной решётки
4.2.1. Расчёт диаграммы направленности одного приёмного элемента
Все рассмотренные датчики, которые можно использовать в качестве приёмника, имеют размеры, меньшие, чем длина волны в воде, поэтому их размеры учитывать не будем. Для вывода формулы воспользуемся рисунком 6.
Рис. 6. К расчёту диаграммы направленности одного датчика.
На рисунке: P – вектор звукового давления;
a – угол падения по отношению к плоскости датчика;
Pn – нормальная составляющая волны;
Pt – тангенциальная составляющая.
Звуковое давление на фронте волны описывается функцией:
P(t) = P0*sin(w*t).
Напряжение Uпр на выходе приёмного датчика пропорционально нормальной составляющей вектора звуковой волны и может быть записано в виде:
Uпр(t,a) = k*P(t)*sinа = k*P0*sin(w*t)*sinа,
где k – коэффициент пропорциональности.
Для построения диаграммы направленности нас интересует амплитуда выходного напряжения Uпр0, а не изменение напряжения во времени, иными словами, только моменты времени, когда sin(w*t) = 1. Кроме того, график должен быть нормализован, то есть, коэффициент k = 1 и P0= 1.
Формула для зависимости нормализованной амплитуды приёмного сигнала от угла падения примет вид:
Uпр0(а) = sinа.
Диаграмма направленности в полярных координатах показана на рисунке 7.
Рис. 7. Диаграмма направленности одного приёмного датчика.
4.2.2. Расчёт диаграммы направленности для двух приёмных элементов, сигналы с которых суммируются
Для вывода формулы воспользуемся рисунком 8.
Рис. 8. К расчёту диаграммы направленности двух датчиков.
По аналогии с предыдущим случаем, напряжение Uпр1 на выходе первого приёмного датчика может быть записано в виде:
Uпр1(t,a) = k*P0*sin(w*t)*sinа,
Напряжение Uпр2 на выходе второго датчика примет вид:
Uпр2(t,a) = k*P0*sin[w*(t + dt)]*sinа.
Сумма сигналов:
Uпр(t,a) = Uпр1(t,a) + Uпр2(t,a) = k*P0*{sin(w*t) + sin[w*(t + dt)]}*sinа.
Используя тригонометрическую формулу:
sin(A + B) = sinA*cosB + cosA*sinB,
получим:
Uпр(t,a) = k*P0*[sin(w*t) + sin(w*t)*cos(w*dt) + cos(w*t)*sin(w*dt)]*sinа =
= k*P0*{sin(w*t)*[1 + cos(w*dt)] + cos(w*t)*sin(w*dt)}*sinа.
Для нормализации графика примем: k = 1, P0= 1. Формула примет вид:
Uпр(t,a) = sin(w*t)*[1 + cos(w*dt)]*sinа + cos(w*t)*sin(w*dt)*sinа.
Имеем два процесса, описывающие колебания приёмного сигнала во времени, сдвинутые по фазе на 90 градусов. Но нас не интересует зависимость сигнала от времени, а только от направления. То есть, только моменты времени, когда
sin(w*t) = 1 [тогда cos(w*t) = 0]
и когда
cos(w*t) = 1 [тогда sin(w*t) = 0].
В результате получим для первого процесса:
Uпр01(а) = [1 + cos(w*dt)]*sinа,
для второго:
Uпр02(а) = sin(w*dt)*sinа.
Из рисунка 8 следует, что d = c*cosa.
Выразим расстояние c между приёмниками через длину волны:
c = n*Λ = n*V/f = n*V*2*π/w.
При скорости распространения звуковой волны V, время dt, за которое волна пройдёт расстояние d:
dt = d/V = c*cosa/V = (n*V*2*π/w)*cosa/V = n*2*π*cosa/w.
Тогда формулы диаграммы направленности для двух процессов примут вид:
Uпр01(а) = [1 + cos(w*n*2*π*cosa/w)] *sinа = [1 + cos(n*2*π*cosa)]*sinа.
Uпр02(а) = [sin(w*n*2*π*cosa/w)] *sinа = [sin(n*2*π*cosa)]*sinа.
Диаграммы направленности в полярных координатах для расстояния между датчиками, равного одной длине волны, показана на рисунке 9. Красным цветом показана диаграмма для первого процесса, зелёным – для второго.
Диаграммы направленности в полярных координатах для расстояния между датчиками, равного двум длинам волны, показана на рисунке 10. Красным цветом показана диаграмма для первого процесса, зелёным – для второго.
Важно понимать физическую интерпретацию этих процессов. Первый процесс показывает, каким будет суммарный выходной сигнал от двух датчиков, когда на один из датчиков приходит сигнал в фазе с максимальной амплитудой. Второй процесс показывает, каким будет суммарный выходной сигнал, когда на один из датчиков приходит сигнал в фазе с минимальной амплитудой, то есть, равной нулю. Очевидно, в первом случае максимальная амплитуда появляется, когда на оба датчика сигнал приходит одновременно, то есть, с фронтального направления и оба датчика выдают максимальную амплитуду. Во втором случае один из датчиков выдаёт нулевой сигнал, а на второй действует максимальное значение нормальной составляющей сигнала.
Рис. 9. Диаграммы направленности двух приёмных датчиков для n = 1.
Рис. 10. Диаграммы направленности двух приёмных датчиков для n = 2.
Амплитуда суммарного сигнала в этом случае не может превысить половины значения максимального сигнала первого варианта. То есть, амплитуда сигнала, приходящего с фронтального направления для двух датчиков всегда не менее, чем в два раза выше сигналов с других направлений.
Наблюдаем обострение диаграммы направленности и появление боковых лепестков при увеличении расстояния между датчиками от одной до двух длин волны. При дальнейшем увеличении расстояния диаграмма направленности продолжает обостряться и появляются новые боковые лепестки.
Оптимальным выглядит расстояние между рассмотренными случаями – от одной до двух длин волны.
Диаграмма направленности системы определяется не только свойствами приёмника, но и свойствами излучателя. В нашем случае предполагается применить излучатель, диаметр которого превышает длину волны, что существенно обостряет диаграмму направленности излучения. С учётом этого обстоятельства, делаем вывод, что двух датчиков в антенной решётке вполне достаточно.
4.3. Конструкция приёмного узла, совмещённого с излучателем, или как не надо делать.
Понятно, что для обеспечения хорошего контакта с согласующим элементом, датчики приёмника должны находиться в одной плоскости с рабочей поверхностью излучателя и располагаться как можно ближе к нему. Кроме того, два датчика имеют рассмотренные выше диаграммы направленности только в плоскости, проходящей через прямую, соединяющую эти датчики. Для получения направленности в перпендикулярной плоскости, необходимо иметь ещё два датчика. Ещё лучше расположить датчики на окружности вокруг излучателя столько, сколько поместится. Это увеличит чувствительность и избирательность приёмного узла. Очевидно, максимальный сигнал на выходе одновременно всех датчиков будет только для фронтального направления. Для любого другого направления сигналы на датчики будут приходить в разных фазах и условие максимума для второго процесса одновременно для всех датчиков невозможно.
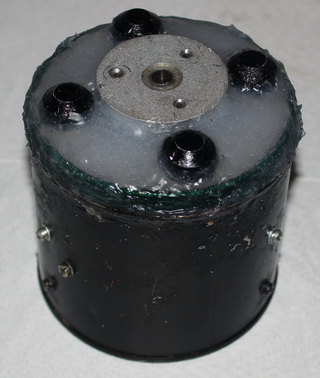
Один из возможных вариантов конструкции показан на рисунке 11.
Рис. 11. Вариант совмещённой конструкции.
Излучатель располагается в центре круглой передней панели диаметром 85 мм. В панели имеются отверстия, в которых располагаются датчики, впаянные в печатную плату. Максимально можно расположить восемь датчиков. На рисунке показано четыре. Расстояние между противоположными датчиками равно 65 мм, что соответствует 1,73 длины волны в воде. Расстояние между соседними датчиками равно 46 мм, что соответствует 1,23 длины волны в воде. Опытный образец этого варианта показан на рисунке 12.
Рис. 12. Опытный образец совмещённой конструкции.
Этот вариант был испытан и показал хорошие результаты для глубоко расположенных предметов. Но реально мёртвая зона составила величину от 1,5 до 2 м. Как раз в этой зоне располагались искомые объекты.
Прямо во время испытаний пришлось разделить излучатель и приёмник, после чего все объекты, и даже кротовые норы, были легко обнаружены.
Таким образом, предпочтительным вариантом оказался вариант с разнесёнными излучателем и приёмными датчиками.
Кроме того, выяснилось, что излучатель сам имеет острую диаграмму направленности, а счетверённый приёмный датчик – очень острую. Приходилось изловчаться, чтобы направить оба на один предмет. В результате был оставлен один приёмный датчик.
В результате, после испытаний определилась работающая конструкция прибора. Далее идёт описание окончательного варианта схемы и конструкции разработанных по результатам испытаний.
5. Окончательный вариант излучателя
5.1. Длительность пачки и мощность импульсов
Самым оптимальным оказался способ, когда на передающий элемент подаётся от 4 до 16 прямоугольных импульсов с частотой резонанса излучателя. Резонансный контур пьезоэлемента сам выделит из прямоугольных импульсов основную синусоиду.
В отличие от датчиков в китайских дальномерах, излучатель имеет большую добротность, поэтому для того, чтобы раскачать его до максимальной амплитуды, требуется 16 импульсов. То есть, больше 16 импульсов подавать бессмысленно. Для большей точности надо подавать как можно меньше импульсов. Но если импульсов меньше 4, сигнал получается слишком слабым. Оптимально иметь три режима:
- основной – 8 импульсов;
- повышенной точности – 4 импульса, на малых глубинах;
- максимальной мощности – 16 импульсов, на больших глубинах.
Мощность импульсов зависит также от напряжения питания. В схеме предусмотрена возможность удвоения напряжения, что ведёт к увеличению мощности в четыре раза.
5.2. Схемотехника
5.2.1. Выходной блок
Мощность, излучаемая пьезоэлементом, напрямую зависит от приложенного к нему напряжения. Но иметь высокое напряжение батареи нежелательно. Оптимальным является напряжение питания 12 В, поскольку аккумуляторов с таким напряжением имеется большой выбор.
Для повышения напряжения может быть использована трансформаторная схема, причём двухтактная, выдающая на выходе двуполярные импульсы.
Конечно, для уменьшения оборудования, в схеме целесообразно применить микроконтроллер. Но мы находимся на стадии проектирования и исследования процессов, возникающих в системе, поэтому будем выполнять функциональные узлы аппаратно, в виде отдельных законченных блоков. Такой подход сильно сэкономит время. Аппаратный блок сделал, отладил, и забыл про него. В микроконтроллере после каждого внесения изменений надо переписывать программу для обеспечения нужных временных параметров управляющих импульсов. В конце разработки функции некоторых блоков могут быть переданы микроконтроллеру.
Вариант схемы выходного блока показан на рисунке 13.
Рис. 13. Вариант схемы выходного блока.
На вход Fin (XS2) подаётся сигнал с частотой, в два раза большей резонансной частоты излучателя. Он поступает на вход C (DD3:11) счётного триггера DD3.2. На его выходах DD3:8 и DD3:9 формируются противофазные сигналы с рабочей частотой Fr, поступающие далее на выводы 12 и 14 драйвера DA2, управляющего транзисторами VT1 и VT2 пушпула, работающего на трансформатор TV1, к выходу которого подключается излучатель. Сигнал Fr выведен на верхний контакт XT5 для контроля рабочей частоты при настройке.
По фронту сигнала на входе Ckl (XT2) и далее на входе C (DD1:11) триггера DD1.2, схема вырабатывает серию из 4, 8 или 16 импульсов, в зависимости от того, к какому выводу счётчика DD2, посредством переключателя SA1, подключён вход C (DD3:3) триггера DD3.1.
Сигнал на верхнем контакте XT7 служит для контроля тока в цепи излучателя.
Излучатель подключается к контактам XT6.
Диоды VD4 … VD7 заложены для варианта, когда излучатель используется в качестве приёмника. В паузе они отключают излучатель от выходного каскада, что устраняет шунтирование принятого сигнала. Но оказалось, что и в варианте с раздельными датчиками они полезны, поскольку сильно уменьшают время звона излучателя после окончания серии импульсов. С этой же целью введён резистор R9.
Контакты XT4 предназначены для подключения дополнительной батареи 12 В, повышающей суммарное напряжение питания выходного каскада до 24 В, что в четыре раза увеличивает мощность выходного сигнала.
К контактам XT1 подключается питание 12 В.
На розетку XS1 поступает напряжение 12 В. Вместе с розеткой XS2 она предназначена для подключения к плате синтезатора частоты Fin, выполненного отдельным блоком.
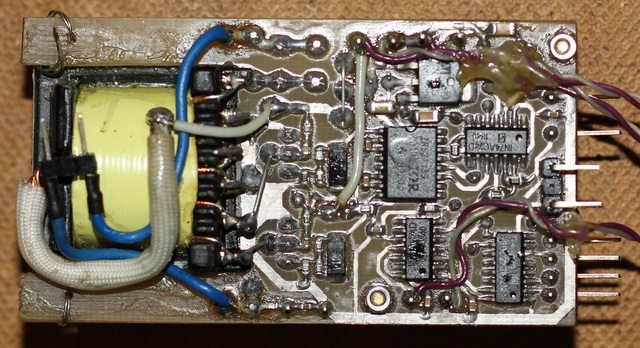
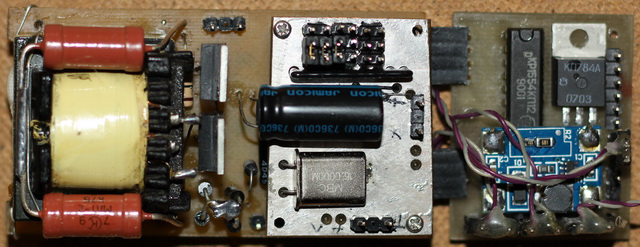
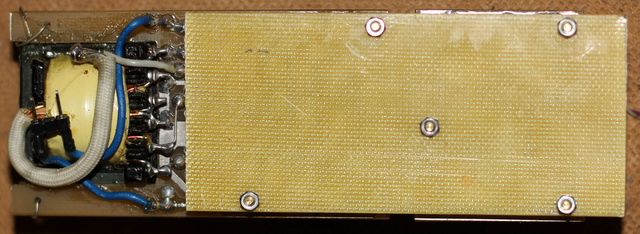
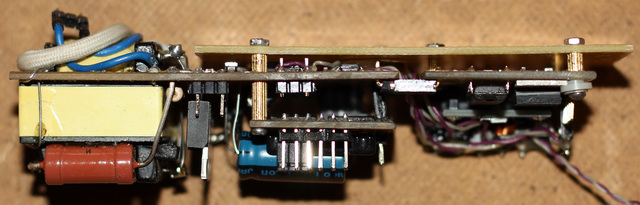
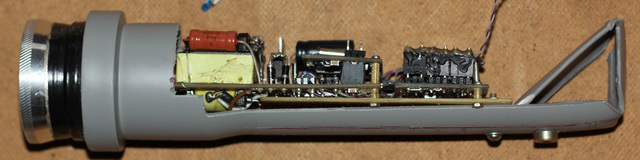
Трансформатор TV1 взят от старого (AT) компьютерного блока питания. Его внешний вид показан на рисунке 14.
Входными обмотками служат обмотки 12 В, а выходной – силовая обмотка.
Рис. 14. Внешний вид трансформатора TV1.
Схема намотки трансформатора показана на рисунке 15.
Рис. 15. Схема намотки трансформатора TV1.
Из схемы следует, что коэффициент трансформации в нашем применении равен 40:7 = 5,7. С учётом потерь, можно ожидать амплитуду выходного импульса порядка 60 В при питании напряжением 12 В и 120 В при напряжении питания 24 В.
5.2.2. Синтезатор входной частоты Fin
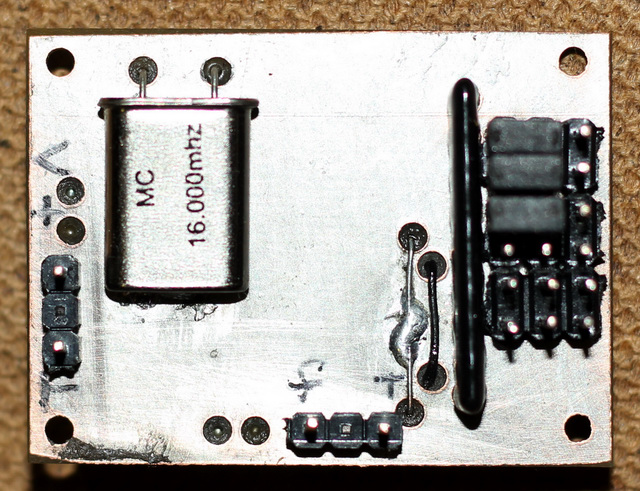
Поскольку частотные свойства излучателей и приёмников имеют существенный разброс, необходимо иметь возможность подстраивать входную частоту при наладке изделия. Кроме того, для гарантирования сохранения настроек в условиях эксплуатации, частота должна быть стабилизирована кварцевым резонатором. Исходя из этих требований, схема получила вид, показанный на рисунке 16.
Рис. 16. Схема синтезатора входной частоты Fin.
Схема состоит из кварцевого генератора частоты 16 МГц, выполненного на микросхеме DD1.1 и резонаторе BQ1, и восьмиразрядного счётчика с предустановкой на микросхемах DD2 и DD3.
Регулировка частоты осуществляется установкой перемычек (джамперов) между одноимёнными контактами штырей XT1 и XT2.
Диапазон регулировок выходной частоты Fin лежит в пределах от 62,5 кГц (31,25 кГц рабочей Fr), когда перемычки не установлены, до 82,9 кГц, (41,45 кГц) когда все перемычки установлены. Шаг изменения – 200 Гц. Как показал опыт, этого достаточно для точной настройки.
Следует заметить, что частота кварца 16 МГц – минимально возможная для удовлетворительной работы. Как видим, средняя частота диапазона 40 кГц лежит не в центре диапазона настройки (31,25 кГц – 41,45 кГц). Гораздо правильнее использовать кварц на 18 МГц. Тогда диапазон настройки лежит в пределах 35,15 кГц – 46,6 кГц. Но поставил, какой нашёл в тумбочке.
5.2.3. Плата расширения
В указанной конфигурации схема была опробована в опытном образце. В нём всё умещалось в одной банке из-под кофе, и провода были достаточно короткими. В разделённом варианте длина проводов существенно увеличивается и прохождение внутрисхемных сигналов через переключатель S1 становится проблемой.
Кроме того, удвоение напряжения на выходном каскаде с помощью дополнительной батареи нерационально. Достаточно удвоить напряжение основной батареи посредством отдельного повышающего преобразователя.
Самым простым и дешёвым вариантом оказалось использование готового китайского преобразователя HW-668. Для его дистанционного включения можно было использовать имеющийся в плате вывод разрешения, но для этого надо ковырять каждую плату. Было принято решение поставить мощный ключ, подающий входное напряжение на всю плату, как наиболее универсальное, поскольку преобразователь в этом случае может быть любым.
Схема платы расширения показана на рисунке 17.
Рис. 17. Схема платы расширения.
На плате установлен мультиплексор DD1, первая секция которого электронным способом переключает внутрисхемные сигналы выходного блока, ранее переключавшиеся механическим переключателем. Вторая секция используется для управления ключом, выполненным на транзисторах VT1 и VT2, включающим преобразователь напряжения HW-668.
Теперь все режимы задаются логическими уровнями на входах A0, A1 и E2 микросхемы DD1. Для задачи режимов могут быть использованы как механические переключатели SA2, SA3, так и сигналы с выходов регистров, например, микроконтроллера.
Все управляющие сигналы выведены на один разъём XT2, что удобно для их передачи в одном жгуте.
Следует отметить, что резистор R9 введён в схему в качестве предохранителя после того, как две платы HW-668 из десяти перешли в режим короткого замыкания. Резистор должен иметь размер 3216. Меньшие сгорают.
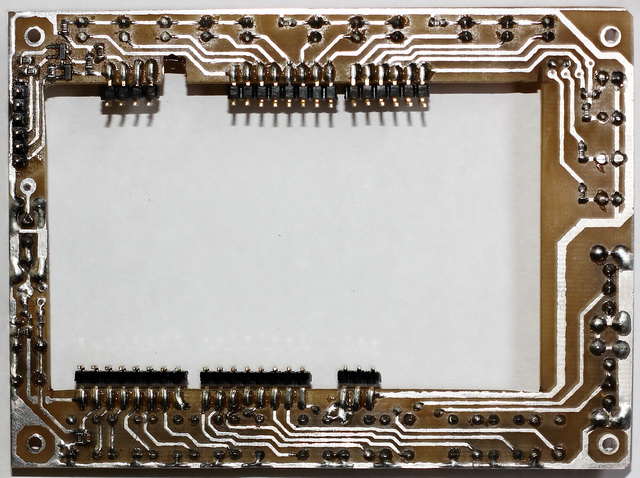
5.3. Сборочные чертежи печатных плат
Сборочный чертёж выходного блока показан на рисунке 18.
Рис. 18. Сборочный чертёж платы выходного блока.
На рисунке 19 показан сборочный чертёж платы синтезатора частоты Fr.
Рис. 19. Сборочный чертёж платы синтезатора частоты Fr.
На рисунке 20 – сборочный чертёж платы расширения.
Рис. 20. Сборочный чертёж платы расширения.
Все разъёмы, перемычки, электролитические конденсаторы и микросхемы в DIP корпусе устанавливаются с обратной стороны платы.
5.4. Внешний вид блоков и их сопряжение
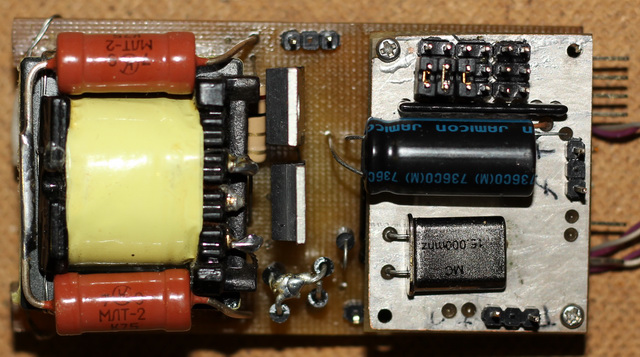
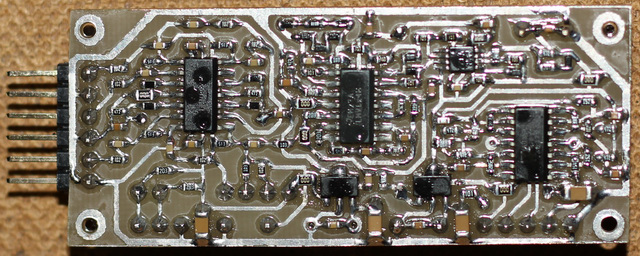
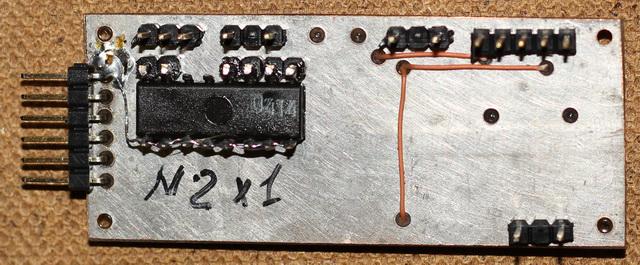
Внешний вид выходного блока со стороны монтажа показан на рисунке 21.
Рис. 21. Внешний вид выходного блока со стороны монтажа.
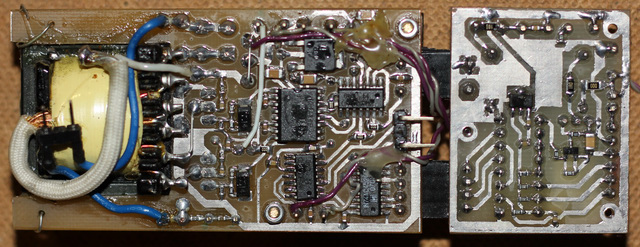
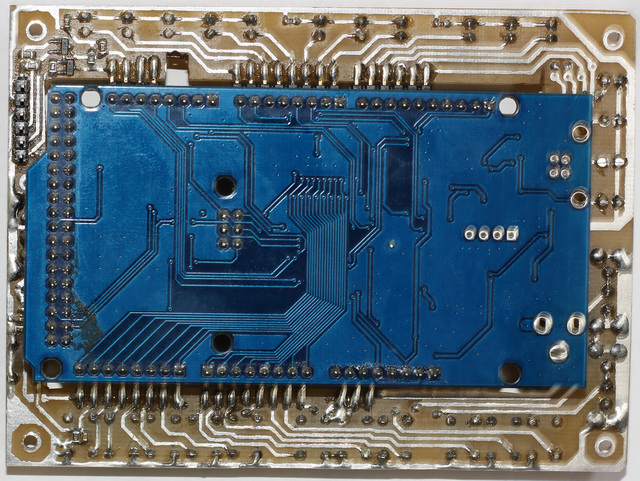
Вид с обратной стороны – на рисунке 22.
Рис. 22. Внешний вид выходного блока с обратной стороны.
Хорошо видно, как расположена плата синтезатора частоты. Стоит обратить внимание, как расположен конденсатор C6 выходной платы и как установлены транзисторы VT1, VT2, диоды VD4 … VD7 и VD1.
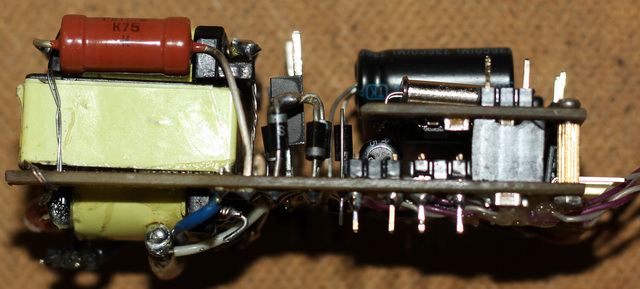
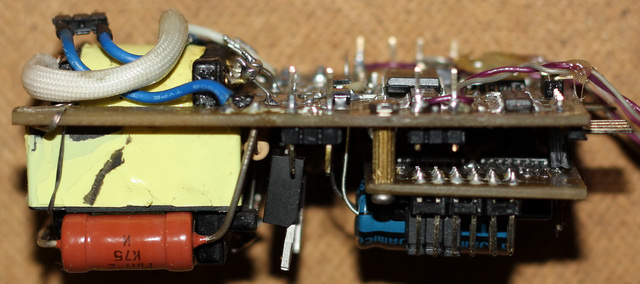
На рисунках 23 и 24 показан вид с боковых сторон.
Рис. 23. Внешний вид выходного блока с правой стороны.
Показан вид на перечисленные выше детали в другой проекции.
Рис. 24. Внешний вид выходного блока с левой стороны.
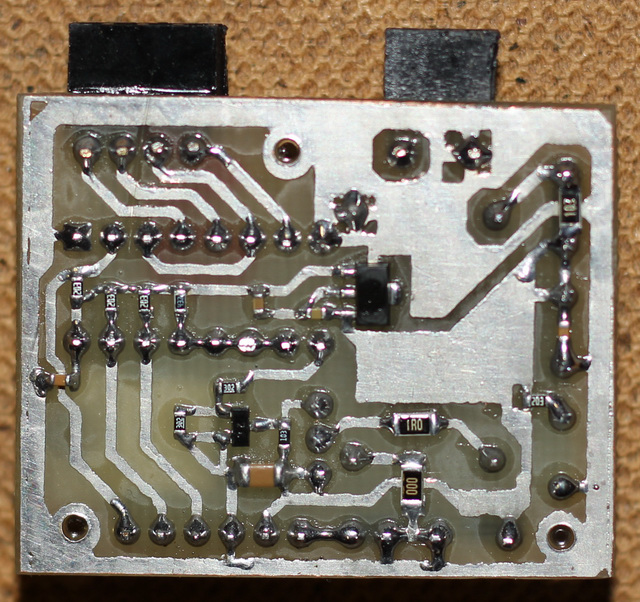
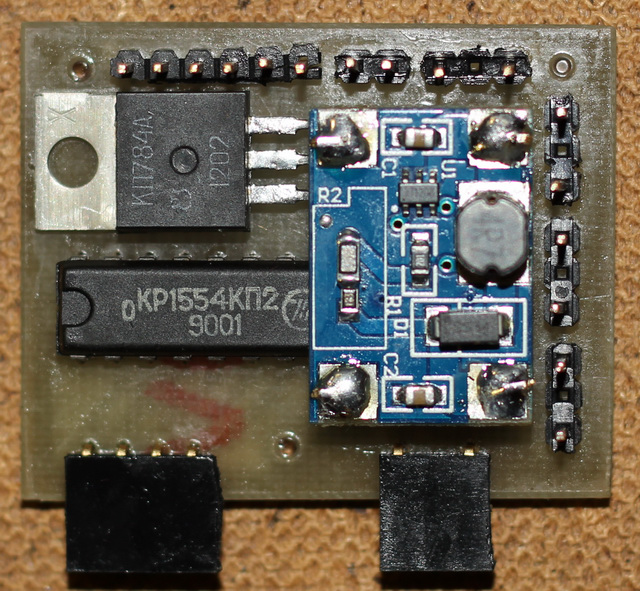
На рисунках 25 и 26 изображены виды платы синтезатора частоты Fin с двух сторон.
Рис. 25. Вид платы синтезатора частоты Fin со стороны монтажа.
Рис. 26. Вид платы синтезатора частоты Fin с обратной стороны.
Обратная сторона платы фольгирована. Все отверстия зенкованы сверлом 2,0 – 2,5 мм.
На рисунках 27 и 28 изображены виды платы расширения с двух сторон.
Рис. 27. Вид платы расширения со стороны монтажа.
Рис. 28. Вид платы расширения с обратной стороны.
На рисунках 29 … 32 показано подключение платы расширения к выходному блоку и соединение их в единую конструкцию.
Рис. 29. Подключение платы расширения к выходному блоку. Вид со стороны монтажа.
Рис. 30. Подключение платы расширения к выходному блоку. Вид с обратной стороны.
Рис. 31. Соединение платы расширения с выходным блоком. Вид с обратной стороны.
Рис. 32. Соединение платы расширения с выходным блоком. Вид с правой стороны.
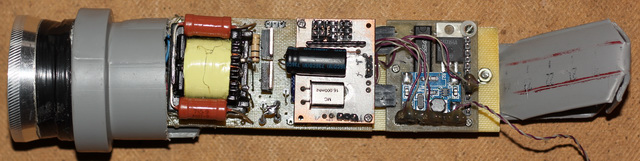
5.5. Вариант конструкции излучателя
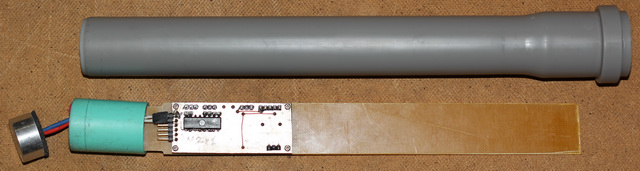
Из стандартной канализационной трубы диаметром 40 мм и длиной 25 см вырезается конструкция, показанная на рисунках 33 и 34. Она как будто специально сделана под излучатель. Он плотно вставляется в неё и обжимается сальником. Дополнительного крепления не требуется. Перед установкой излучателя сальник следует достать и уложить провода от излучателя между сальником и трубой, после чего вернуть сальник на место
Рис. 33. Конструкция из трубы диаметром 40 мм. Вид сбоку.
В нижней части справа видна резьбовая втулка, в неё вкручивается винт, крепящий этот узел к внешней трубе диаметром 50 мм. В правой части путём сгибания излишков пластмассы сделан упор для фиксации батареи аккумуляторов.
Рис. 34. Конструкция из трубы диаметром 40 мм. Вид сверху.
Место сопряжения трубы и излучателя обмотано изолентой.
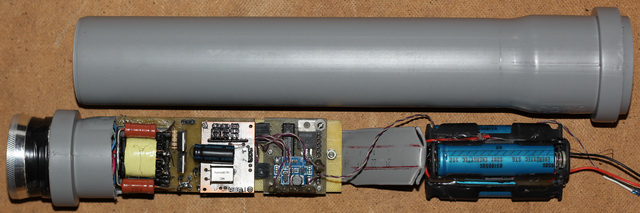
На рисунке 35 показана последовательность расположения деталей во внешней трубе, А на рисунке 36 – законченный вид изделия. Перед окончательной сборкой место сопряжения внутренней трубы с внешней обмотать тонким слоем ткани, пропитанной мовилем (антикоррозийное средство для заливки в пороги автомобилей). Для защиты от попадания влаги.
Рис. 35. Последовательность расположения деталей во внешней трубе.
Рис. 36. Законченный вид излучателя.
Батарея из трёх аккумуляторов типоразмера 18650 сделана из трёх держателей, расположенных под углом 120 градусов. Аккумуляторы просто заменяются, а заряжаются в отдельном стандартном зарядном устройстве. Размещение батареи в трубе показано на рисунке 37.
Рис. 37. Размещение батареи в трубе.
5.6. Характеристики разработанного излучателя
Получился законченный базовый блок излучателя. Окончательный вид он принимает в зависимости от варианта исполнения изделия в целом. Либо в него добавляется плата WyFy и управление осуществляется от центрального пульта. При этом, из блока никаких проводов не выходит, либо выходит жгут проводов от разъёма XT2 платы расширения на пульт управления.
Электрические характеристики излучателя, полученные в результате испытаний, приведены в таблице 5.1.
Таблица 5.1. Электрические характеристики излучателя в разных режимах.
|
№
п/п
|
Количество импульсов в пачке
|
Uпит = 12 В, Uвых = 60 В
|
Uпит = 24 В, Uвых = 120 В
|
|
Ток, потр. от
батареи, Iпотр, мА
|
Ток в последнем импульсе,
Iимпмах, А
|
Мощность последнего импульса,
Pмах, Вт
|
Ток, потр. от батареи, Iпотр, мА
|
Ток в последнем импульсе,
Iимпмах, А
|
Мощность последнего импульса,
Pмах, Вт
|
|
1
|
4
|
26,5
|
0,16
|
9,6
|
37,5
|
0,26
|
31,2
|
|
2
|
8
|
28,0
|
0,26
|
15,6
|
45,0
|
0,52
|
62,4
|
|
3
|
16
|
31,6
|
0,56
|
33,6
|
160
|
1,10
|
132
|
Как видим, импульсный ток в выходной обмотке трансформатора не маленький, а в первичной обмотке он в 5,7 раз выше. Но средний ток, потребляемый от батареи не очень большой, за исключением самого мощного режима. Это следствие того, что импульсы подаются не слишком часто. После каждой пачки импульсов идёт обработка результатов, только после её окончания подаётся следующая пачка.
Если считать, что от заряженного аккумулятора при нормальной эксплуатации можно снять 2/3 от его номинальной ёмкости, то от применённых аккумуляторов ёмкостью не менее 1,5 А*ч можно снять 1 А*ч электроэнергии.
Опыт показал, что наиболее востребованными являются первый и второй режимы, в которых средний ток, потребляемый от батареи, не превышает 45 мА. Отсюда можно сделать вывод, что одного заряда батареи должно хватить не менее, чем на
1000 мА*ч / 45 мА = 22,2 часа,
то есть, на два – три дня непрерывной работы, исходя из нормы 8 часов в день.
Самым мощным режимом не стоит злоупотреблять. Мощность излучателя 60 Вт, а в мощном режиме излучается, хоть и кратковременно, но в два с лишним раза больше. Специальных испытаний на устойчивость излучателя к такому стрессу не проводилось. Но иногда очень хочется посмотреть, а нет ли чего-нибудь на большой глубине. Это на свой страх и риск.
6. Окончательный вариант приёмника
6.1. Схемотехника
Электрическая принципиальная схема приёмника показана на рисунке 38.
Рис. 38. Электрическая принципиальная схема приёмника.
Схема рассчитана на подключение от одного до трёх датчиков BA1 … BA3 на входе. Для каждого датчика предусмотрен предварительный усилитель (DA2.2 … DA2.4). Сигналы с выходов предварительных усилителей суммируются на ОУ DA2.1. Поскольку датчики имеют некоторое внутреннее сопротивление, реальные коэффициенты усиления усилителей с подключёнными датчиками получились равными 36. Коэффициент усиления суммирующего усилителя DA2.1 может изменяться путём подключения параллельно резистору обратной связи R10 резисторов R14 или R16 посредством аналогового мультиплексора DA3 и переключателя SA1. Таким образом, имеем три варианта усиления каскада – х1, х6 и х36.
Возможность подключения нескольких датчиков продиктована тем, что, во-первых, в результате суммирования, от двух – трёх дешёвых датчиков 16 или 18 мм можно получить сигнал с амплитудой большей, чем от одного датчика 25 мм, который в три раза дороже. Например, чувствительность датчика 25 мм -68 дб, а чувствительность датчика 18 мм -70 дб. Сигнал от двух датчиков 18 мм будет в два раза, или на 6 дб больше, чем от одного. Результирующая чувствительность будет -64 дб против -68 дб одного датчика 25 мм, что на 4 дб, или в 1,59 раз лучше.
Во-вторых, как выше было показано, направленность приёмной части из двух или трёх датчиков существенно выше, чем из одного. Поскольку экспериментально было установлено, что излучатель и приёмник должны быть пространственно разнесены, хотя бы на 10 см, имеет смысл изготовить приёмную головку из двух датчиков, расположенных на одной линии с излучателем. В этом случае сильно ослабляются помехи от предметов, расположенных слева и справа от прямой, по которой ведётся съёмка профиля. Головка из трёх датчиков, расположенных по кругу, имеет лучшую направленность и чувствительность по фронту, её следует применять при сканировании на больших глубинах. В идеале хорошо иметь все три варианта сменных головок.
Сигнал с выхода DA2:1 суммирующего усилителя через конденсатор C13 и резистор R22 поступает на вход DA5:13 инвертирующего повторителя сигнала DA5.4. Повторитель поставлен для того, чтобы, при подключении осциллографа к штырям XT5, не нарушались параметры полосового фильтра, построенного на ОУ DA5.1. Параметры фильтра: центральная частота F = 40 кГц, добротность Q = 4, усиление A = 2.
С выхода фильтра DA5.1 сигнал поступает на вход усилителя с логарифмическим ограничением уровня DA5.3. Коэффициент усиления слабых сигналов равен 3. Ограничение сигнала на выходе до +,- 2,0 В от опорного напряжения (2,5 В).
С выхода DA5:2 ограничивающего усилителя сигнал подаётся на схему детектора, построенного на ОУ DA5.2 и DA7.1.
С выхода DA7:1 детектора сигнал через конденсатор C28 поступает на схему смещения уровня, построенную на ОУ DA7.2. На выходе детектора сигнал появляется относительно уровня смещения 2,5 В. На входе и выходе схемы смещения уровня, он появляется относительно нулевого потенциала (земли).
Отрицательные выбросы напряжения на входе DA7:5 обрезаются диодом VD10. Он обязательно должен быть диодом Шоттки, иначе схема будет работать неправильно.
Схема смещения имеет коэффициент усиления 2,4, для того, чтобы поднять максимальный выходной уровень до 4 В.
С выхода DA7:7 схемы смещения сигнал фильтруется цепью R41, C27, на выходе фильтра (конденсатор C7) появляется уровень, пропорциональный входному сигналу. Этот уровень поступает на схему дискриминаторов, выполненных на ОУ микросхемы DA6, которые используются в режиме компараторов.
Уровни дискриминирования сигналов задаются делителем напряжения питания резисторами R36 … R40. Уровни подобраны так, чтобы каждый следующий компаратор включался при увеличении входного сигнала примерно в 2,5 – 3,0 раза. Справа на схеме приведены уровни включения компараторов при различных коэффициентах усиления суммирующего усилителя. Данные со схемы дискриминатора являются результатом работы приёмной части и направляются в процессор для анализа.
Анализ проводится после каждого фронта и спада сигналов с дискриминатора. Вычисляется время, прошедшее после подачи сканирующего сигнала до прихода первого импульса, длительность импульса, время, прошедшее до прихода следующего импульса и далее аналогично, пока не закончится время, отведённое на процесс одного сканирования, которое определяется установкой максимальной глубины сканирования.
Максимальная чувствительность схемы приёмника составила 15 мкВ. Это величина, в два раза большая уровня шумов. Чувствительность можно повысить ещё в 10 раз, но вместе с шумами. То есть, в применённой элементной базе это бессмысленно. Достигнут максимум возможного.
Кстати, про элементную базу. В первых вариантах приёмника применялись операционные усилители с полосой пропускания 1 МГц. Чувствительности лучше, чем 3 мВ получить не удалось. Схема возбуждалась. Применённые операционные усилители имеют полосу пропускания 5,6 МГц. Это следует учитывать при попытке замены элементной базы.
6.2. Сборочный чертёж печатной платы приёмника
Сборочный чертёж печатной платы приёмника приведён на рисунке 39.
Типоразмер резисторов и конденсаторов 1608.
Все штыри и перемычки устанавливаются с обратной стороны платы.
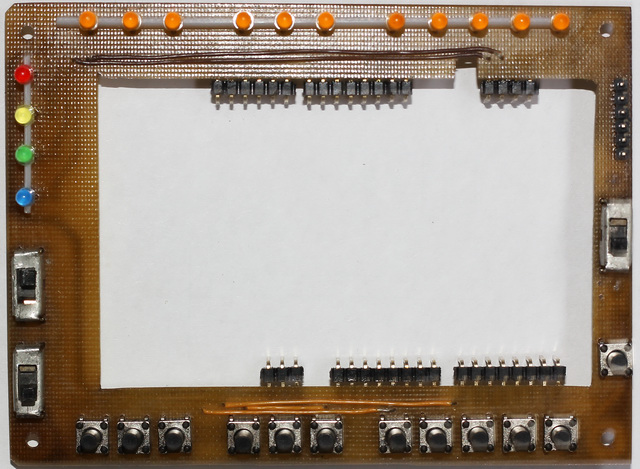
Рис. 39. Сборочный чертёж печатной платы приёмника.
6.3. Внешний вид платы приёмника
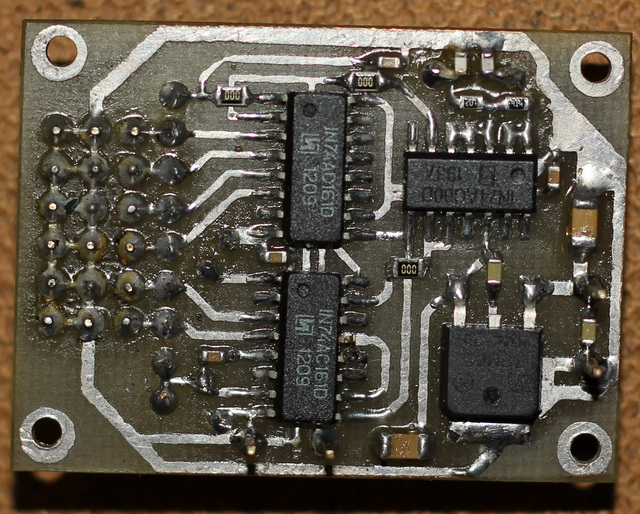
Внешний вид со стороны монтажа показан на рисунке 40, а с обратной стороны – на рисунке 41.
Рис. 40. Внешний вид платы приёмника со стороны монтажа.
Рис. 41. Внешний вид платы приёмника с обратной стороны.
Хорошо видно, как припаяна микросхема DA3 к штырям XT3 и XT4.
Обратная сторона платы фольгирована. Все отверстия зенкованы сверлом 2,0 – 2,5 мм.
6.4. Вариант конструкции приёмника
Конструкция приёмника аналогична конструкции излучателя и показана на рисунках 42 и 43. В показанном варианте использован датчик 25 мм.
Рис. 42. Конструкция приёмника в разобранном виде.
Рис. 43. Конструкция приёмника в собранном виде.
6.5. Характеристики разработанного приёмника
Это базовый вариант. В простейшем варианте от платы отходит жгут проводов, который идёт на схему управления. В более сложных модификациях на планку внутри трубы могут быть добавлены платы процессора или WiFi, в зависимости от модификации. Внешний вид от этого не изменится.
Измеренные электрические характеристики полученного в результате разработки приёмника приведены в таблице 6.1.
Таблица 6.1. Электрические характеристики приёмника.
|
№
п/п
|
Напряжение на входе дискриминатора, В
|
Напряжение на входе приёмника, мВ
|
|
SA1: = х36
|
SA1: = х6
|
SA1: = х1
|
|
1
|
0,2
|
0,015
|
0,12
|
0,75
|
|
2
|
1,0
|
0,045
|
0,30
|
1,90
|
|
3
|
2,5
|
0,135
|
0,75
|
4,30
|
|
4
|
3,5
|
0,300
|
1,55
|
8,90
|
Ввести переключатель коэффициентов усиления заставили результаты испытаний. Для большей точности определения расстояния до объекта необходимо иметь минимальную длину полученного отражённого импульса. При высокой чувствительности приёмника и большой величине амплитуды отражённого импульса, в приёмнике он сильно удлиняется. Оптимально устанавливать такой коэффициент усиления (и мощность излучения), при котором срабатывают не все уровни дискриминатора. Когда объект находится на небольшой глубине, максимальная точность определения расстояния до него достигается в положении х1 при минимально возможной длине пачки импульсов.
7. Простейший вариант эхолота
Итак, базовые узлы – излучатель и приёмник разработаны полностью и оформлены в законченные конструктивные единицы. Дальнейшее развитие зависит только от того, как мы будем управлять работой изделия и обрабатывать полученную информацию. Варианты настолько разные, что рассматривать их можно только отдельно. Ничего общего в возможных структурах получаемых изделий не просматривается. Поэтому рассмотрим несколько наиболее удачных из них по отдельности. Начнём с самого простого.
7.1. Схема соединений простого варианта исполнения
Схема соединений излучателя и приёмника со схемой управления приведена на рисунке 44.
Рис. 44. Схема соединений излучателя и приёмника со схемой управления.
Из схемы следует, что питание приёмника осуществляется от аккумулятора, расположенного в излучателе, через колодку XT2 платы расширения излучателя на контакты XT1 приёмника.
Переключатели, определяющие режимы работы излучателя и приёмника, установлены на панели вблизи излучателя и приёмника.
От устройства управления на колодку XT2 платы расширения излучателя подаётся сигнал CKL начала цикла измерения, по которому излучатель формирует на выходе заданное переключателем SA2 количество импульсов. Результат измерения поступает на устройство управления с колодки XT9 приёмника. Сигналы OUT1 с выходa сумматора и OUT2 с выхода детектора подаются на вход осциллографа для визуального контроля. Кроме того, на устройство управления подаётся напряжение 12 В с аккумулятора для контроля состояния батареи.
Устройство управления соединено с излучателем и приёмником жгутом из 11 проводов. Это главный недостаток простого варианта изделия, вызывающий некоторые неудобства в работе.
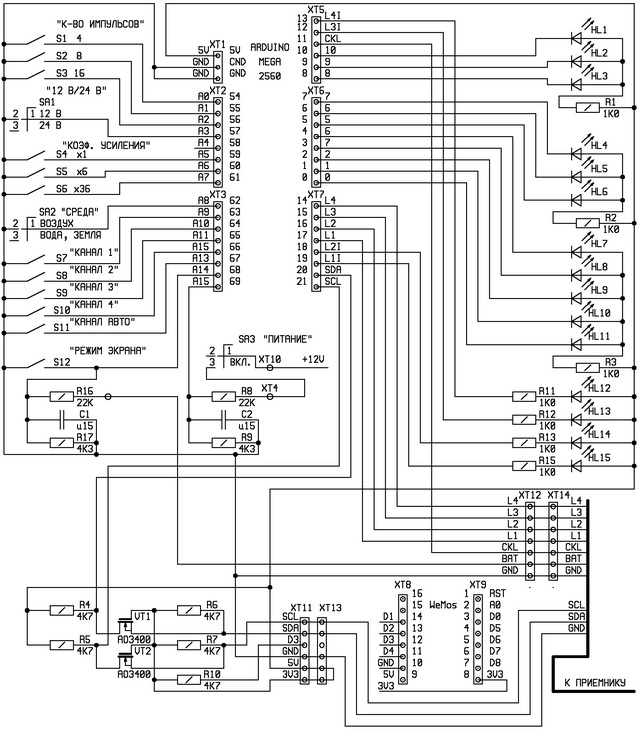
7.2. Схема блока управления
Блок управления выполнен на базе Ардуино Мега 2560 с дисплеем. Принципиальная схема блока управления представлена на рисунке 45.
Рис. 45. Схема блока управления.
На входы A0…A3 контроллера (выводы 54…57) поступают сигналы L4…L1 с выхода схемы дискриминатора приёмника. На входы A5…A8 (выводы 59…62) подаются сигналы с переключателей режимов работы SA1…SA4. Входы A9 (вывод 63) и A11 (вывод 65) являются аналоговыми и служат для контроля напряжения на аккумуляторах соответственно излучателя – приёмника и собственного аккумулятора контроллера. Выход A10 (вывод 64) используется для подачи на излучатель сигнала инициализации CKL.
В исходном состоянии на контакты 2 переключателей SA1…SA4 подаётся уровень логического нуля (земля). При переключении любого переключателя в другое положение, вход подключённого к нему адреса контроллера переключается в состояние логической единицы, поскольку все соответствующие им входы контроллера подключены к шине питания внутренними подтягивающими резисторами.
Переключатель SA1 устанавливает среду, в которой производится измерение: 0 – воздух, 1 – вода или грунт.
Переключатели SA2 и SA3 определяют выход схемы дискриминатора (L1 – L4), обрабатываемой в текущий момент:
0, 0 – L4;
1, 0 – L3;
0, 1 – L2;
1, 1 – L1.
Но только в том случае, когда переключатель SA4 находится в нижнем положении, то есть, разомкнут.
Если переключатель SA4 в верхнем положении, перебор выходов схемы дискриминатора происходит автоматически, не зависимо от положения переключателей SA2 и SA3.
Скетч прилагается в виде отдельного текстового файла «Эхолот_вар1». Его необходимо скачать (то есть, не открывать в браузере, а "сохранить как"), и перед загрузкой в Ардуино изменить расширение «.txt» на «.ino».
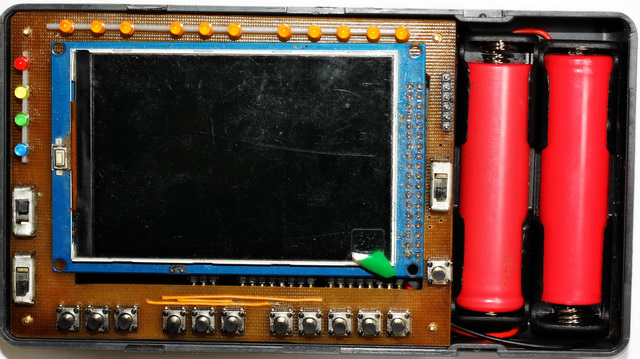
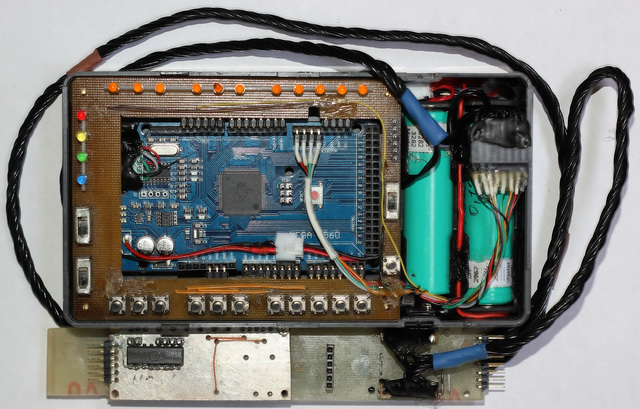
7.3. Внешний вид компонентов изделия
Внешний вид объединённых излучателя и приёмника показан на рисунке 46. На рисунке 47 – блок управления . На рисунке 48 – комплект в сборе.
Рис. 46. Внешний вид объединённых излучателя и приёмника.
Рис. 47. Внешний вид блока управления.
Это очень опытный промежуточный образец панели управления, поэтому он совсем не причёсан. Верхнюю часть занимают панель с переключателями и сам Ардуино Мега 2560 с экраном. В нижней части расположен осциллограф.
На экране в верхнем левом углу показывается расстояние до объекта, в нижнем левом углу – шкала (предел измерения). В центре слева, зелёным цветом, – напряжение контролируемой батареи. При понижении напряжения до 10,5 В и ниже, цвет становится красным. На остальной части экрана – графическое отображение времени до прихода импульса (в данном случае белым цветом) и длительность импульса (фиолетовым). Если импульсов несколько, все они последовательно отражаются на вертикальной линии экрана. Одна вертикальная линия отражает результат измерения в одном цикле и запоминается до переполнения экрана. В левый верхний угол заносится расстояние, рассчитанное по времени прихода последнего в цикле измерения импульса.
Рис. 48. Комплект в сборе.
7.4. Недостатки простейшего варианта
Основным недостатком является жгут проводов, который связывает схему управления с излучателем и приёмником. Он сильно снижает удобство и мобильность в работе.
Вторым недостатком является наличие органов управления не только в схеме управления, а на излучателе и приёмнике.
Далее рассмотрим вариант, в котором эти недостатки устранены.
Кроме того, наличие осциллографа, хотя и помогает иногда разобраться с текущей ситуацией, но делает схему управления громоздкой и не является обязательным.
В следующем варианте предпринята попытка перенести осциллограмму на экран Ардуино.
8. Вариант изделия с беспроводной связью
На предыдущих этапах разработки достигнуты максимально возможные в применённой элементной базе характеристики излучателя и приёмника. То есть, совершенствовать схемотехнику дальше некуда. Конструктивно есть возможность совершенствования. Например, собрать все части излучателя на одной плате.
В следующем варианте предусмотрены все просматриваемые на сегодня пути развития. После того, как этот вариант был собран, дальнейшее развитие стало определяться только программным обеспечением. И здесь совершенству не видно предела.
8.1. Краткое описание применяемого оборудования
Если ранее упор был сделан на описание вновь разработанного оборудования, то далее имеет смысл описать применяемое оборудования сторонних производителей.
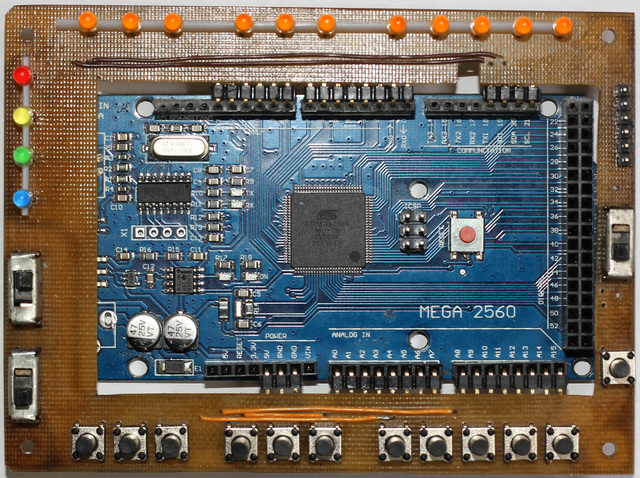
8.1.1. Arduino Mega 2560
Внешний вид Arduino Mega 2560 с описанием выводов показан на рисунке 49.
Arduino Mega 2560 построена на микроконтроллере ATmega 2560, имеет 54 цифровых входов/выходов (14 из которых могут использоваться как выходы ШИМ), 16 аналоговых входов, большее количество аппаратных serial-портов — 4 последовательных порта UART, кварцевый генератор 16 МГц, USB коннектор, разъем питания, разъем ICSP и кнопка перезагрузки.
Основные характеристики:
Микроконтроллер ATmega2560
Цифровые входы/выходы 54 (14 из которых могут работат также как выходы ШИМ)
Аналоговые входы 16
ШИМ (PWM) пины 14
Flash-память 256 KB (из которых 8 КB используются для загрузчика)
SRAM/ОЗУ 8 KB
EEPROM 4 KB
Тактовая частота 16 МГц
Длина 101.6 мм
Ширина 53.4 мм
Рис. 49. Внешний вид Arduino Mega 2560 с описанием выводов.
В нашем случае все контакты нижнего разъёма заняты экраном, поэтому доступны только контакты боковых разъёмов. Но и оставшихся достаточно для свободного творчества. Огромное количество выводов (всего 70) – главное для нас преимущество Arduino Mega 2560 перед другими доступными изделиями.
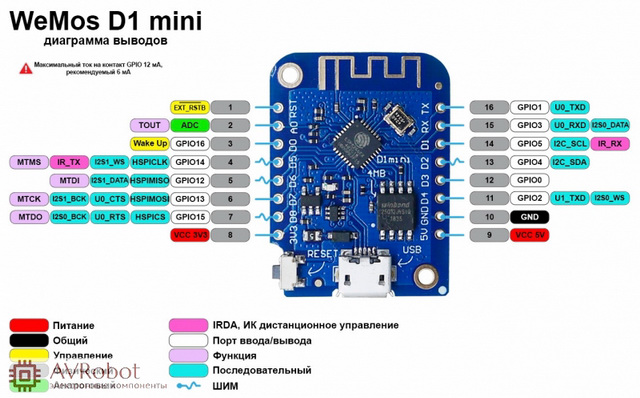
8.1.2. WeMos D1 Mini V3.0.0
WeMos D1 mini V3.0.0 – это, прежде всего, контроллер WiFi, который позволяет организовать беспроводную связь между двумя или несколькими изделиями, а также подключаться к сети WiFi и через неё к компьютеру, планшету или смартфону.
Внешний вид WeMos D1 mini V3.0.0 с описанием выводов показан на рисунке 50.
Рис. 50. Внешний вид WeMos D1 mini V3.0.0 с описанием выводов.
На плате доступно 11 цифровых входов/выходов и 1 аналоговый вход.
Харктеристики:
Микроконтроллер: ESP-8266EX (ATmega 2560 в MEGA)
Рабочее напряжение: 3.3 В (5,0 В в MEGA)
Цифровые выходы: 11 (54 в MEGA)
Аналоговые выходы 1(Max : 3.2В) (16 в MEGA)
Рабочая частота: 80 МГц/160 МГц (16 МГц в MEGA)
Flash: 4M bytes (256 KB в MEGA)
SRAM 64 KB (8 KB в MEGA)
EEPROM 512 bytes (4 KB в MEGA)
Размер: 34х25 мм (101,6х53,4 мм у MEGA)
В таблице в скобках приведены для сравнения характеристики Arduino Mega.
Из сравнения следует, что главное, в чём проигрывает WeMos, - количество входов/выходов. Зато она имеет возможность передавать информацию по WiFi.
По рабочей частоте, размеру Flash памяти и SRAM вычислительные возможности этой маленькой платы на порядок мощнее, чем у Arduino Mega.
Напрашивается мысль, что основную работу лучше перенести в плату WeMos, упрощая тем самым блок управления и вывода информации на экран. В итоге его можно упростить до нескольких регистров, экрана и панели с кнопками и светодиодами.
В идеале надо стремиться к тому, чтобы заменить Arduino Mega смартфоном или планшетом. Тогда мы убираем из изделия самый дорогой и сложный в изготовлении узел. Тем более, что смартфон или планшет могут быть и морально устаревшими. Был бы экран целый.
Однако, хочется не начинать новую работу, а делать переход плавно, поддерживая изготовленный образец в рабочем состоянии. Поэтому будем двигаться вперёд постепенно.
Но первоначальный рывок сделать всё же придётся. Заключается он в том, что для следующего варианта необходимо изготовить пару печатных плат.
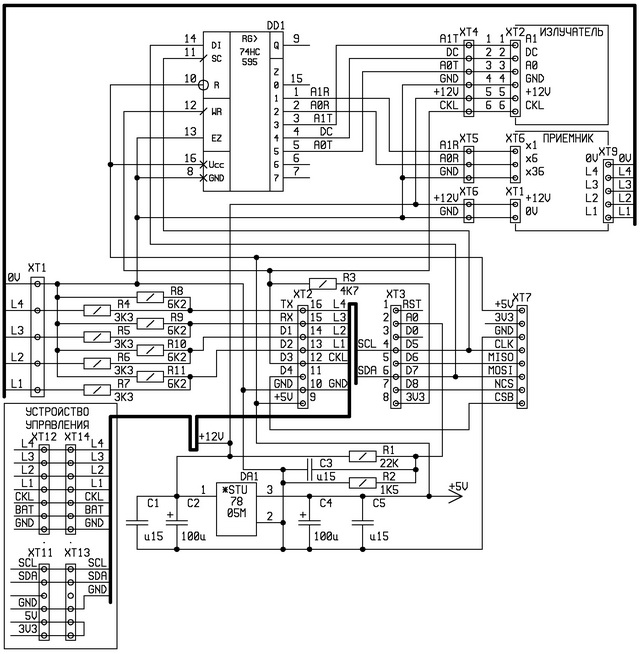
8.2. Исполнительное устройство (излучатель и приёмник)
8.2.1. Схема соединений исполнительного устройства
Схема соединений исполнительного устройства показана на рисунке 51.
Рис. 51. Схема соединений исполнительного устройства.
К имеющемуся оборудованию добавлена плата WeMos D1 mini V3.0.0. (которая внутри питается напряжением 3,3 В).
Основная её задача на текущем этапе заключается в получении результатов измерений L1 – L4 (через делители R4 – R11 в качестве преобразователей уровня 5 В в 3,3 В), некоторая обработка этих данных и отправка их на блок управления по беспроводной связи. Эта задача требует занятия четырёх выводов платы WeMos.
Вторая задача - получение от блока управления сигналов текущего состояния, установленного органами управления режима работы (задание коэффициента усиления приёмника A0R, A1R, количество импульсов в пачке A0T, A1T, напряжение питания оконечного каскада излучателя DC и сигнал инициализации CLK) и передача их на приёмник и излучатель. Кроме того, единственный аналоговый вход A0 платы WeMos используется для измерения напряжения батареи, которое также передаётся на блок управления и индикации.
В развитие изделия предусмотрено подключение в будущем платы HW-612 или GY-91, содержащие в себе трёхосевой акселерометр, трёхосевой гироскоп, трёхосевой магнитометр и датчик давления. Использование этих данных позволит определять ориентацию в пространстве, высоту и траекторию движения при проведении измерений. А далее автоматически создавать профиль исследованного объекта. И на это ушло пять выводов платы WeMos.
В результате свободными остались два вывода, из которых один необходимо использовать для выдачи сигнала CKL. И остался один (D0), который, кстати, во избежание ненужных ухищрений в программе, рекомендуется оставить свободным. А ещё необходимо раздать пять сигналов управления излучателем и приёмником: A0R, A1R, A0T, A1T и DC.
Для передачи этих сигналов был использован регистр с последовательным вводом и параллельным выводом информации DD1. Занесение информации в регистр управляется сигналами MOSI и CLK того же интерфейса, который используется для связи с платой HW-612. Данные с вывода 6 (MOSI) заносятся синхроимпульсами с вывода 4 (CLK) в сдвигающий регистр микросхемы DD1 и по фронту импульса CKL с вывода 12 появляются на выходах микросхемы DD1. То есть, обновление данных может происходить только в начале каждого цикла.
Следует обратить внимание на тот факт, что для регистра DD1 не предусмотрен отдельный сигнал выборки, аналогичный сигналам NCS и CSB для платы HW-612. И в регистр будут заноситься все данные при передаче информации на плату HW-612. Поэтому передачу в регистр необходимо делать непосредственно перед выдачей сигнала CKL, который тут же перенесёт полученную информацию на выходы микросхемы DD1.
Для реализации показанной схемы соединений, разработана плата расширения приёмника, на которой располагаются все вновь введённые детали.
8.2.2. Схема платы расширения для приёмника
Схема платы расширения приёмника приведена на рисунке 52.
Рис. 52. Схема платы расширения приёмника.
На схеме оставлены те же позиционные обозначения деталей, что и на схеме соединений. Узлы, к которым идут связи с платы расширения, тоже показаны. В принципе, эту схему можно использовать наравне со схемой соединений.
8.2.3. Сборочный чертёж платы расширения для приёмника
Плата расширения теперь является основной платой. На ней устанавливаются плата приёмника и плата WeMos. На плате проведены все связи между ними. Никаких проводов больше не требуется. Имеется два разъёма для связи с внешними устройствами. Связь с излучателем осуществляется через разъём XT4. И установлен разъём XT7 для связи с платой HW-612. Её нельзя устанавливать на основной плате. Она используется для навигации и должна быть установлена в верхней части трубы приёмника перпендикулярно её оси так, чтобы ось X была направлена в сторону передней части изделия.
Сборочный чертёж и разводка платы расширения показаны на рисунке 53.
Рис. 53. Сборочный чертёж и разводка платы расширения приёмника.
Плата приёмника и плата WeMos устанавливаются с нижней стороны платы расширения. Для этого пришлось перепаять штыри на плате приёмника на лицевую сторону платы.
8.2.4. Внешний вид платы расширения для приёмника
Внешний вид платы расширения в сборе со стороны монтажа показан на рисунке 54. Установка плат приёмника и WeMos с обратной стороны платы показана на рисунке 55.
Рис. 54. Плата расширения в сборе. Сторона монтажа.
Рис. 55. Плата расширения в сборе. Обратная сторона.
Таким образом, имеем полностью законченную конструкцию приёмной части. Плата вставляется в трубу. К левому разъёму подключается пьезоэлектрический датчик, к правому – плата HW-612, к розетке в середине платы, впаянной вместо штырей XT4, подключаются провода сигналов управления на излучатель и провода от источника питания, расположенного в трубе излучателя.
8.3. Блок управления
8.3.1. Схема соединений блока управления
Схема соединений блока управления показана на рисунке 56.
Рис. 56. Схема соединений блока управления.
Плата WeMos соединена с платой Arduino Mega через двунаправленные преобразователи уровней с 5 В в 3,3 В и наоборот (R4 – R7, VT1, VT2), двумя проводами интерфейса I2C, по которому и происходит обмен данными. Это вместо жгута проводов.
Неудобные в работе переключатели заменены кнопками со светодиодами. В основном это сделано в попытке создать конструкцию, позволяющую управлять одной рукой.
Добавлена кнопка S12 переключения режима отображения информации на экране. Например, отображение осциллограммы. Она не имеет светодиода. Режим виден на экране. Режимов может быть несколько. Все они переключаются этой кнопкой в определённой последовательности.
Кроме того, добавлено четыре светодиода HL12 – HL15, для отображения текущих значений выходных сигналов с приёмника. Это позволяет быстро ориентироваться в уровнях передаваемых и принимаемых сигналов. Максимальная точность сканирования достигается, когда уровни сигналов лежат в пределах L1 – L3, то есть, светятся светодиоды HL13 – HL15, а светодиод HL12 не светится или светится слабо. Взглянув на эти светодиоды можно быстро сориентироваться, какие уровни сигналов следует установить в излучателе и какой коэффициент усиления установить в приёмнике. Предполагается, что в перспективе об этом будет заботиться программа. Но дожить бы до этой перспективы.
Схема соединений Arduino и программа изменены полностью. Теперь он занимается только опросом и индикацией нажатия кнопок и выводом информации на дисплей.
Не следует забывать, что в лице второй в изделии платы WeMos мы имеем ещё один мощный процессор, на который тоже можно возложить часть вычислений. В применённой конфигурации на тыльной стороне экрана установлен слот для SD-карты памяти. Предполагается, что вторая плата сможет обработать информацию и записывать её в карту памяти в формате рисунка. Сегодня этим занимается компьютер.
8.3.2. Схема платы - панели блока управления
Схема платы блока управления, которая одновременно служит лицевой панелью блока управления, показана на рисунке 57.
Рис. 57. Схема платы - панели блока управления.
По сравнению со схемой соединений, на ней появились разъёмы XT11 и XT12.
XT11 служит для подключения платы WeMos, поскольку на плате управления она не помещается. Кстати, возможность снимать плату удобна для её программирования.
XT12 на плате не установлен и подключается к ней проводами. Он используется для возможности проводной связи платы и исполнительного устройства, как в предыдущем варианте, для плавного перехода от проводного варианта к беспроводному. При этом, светодиоды L1 – L4 работают в инверсном режиме, а кнопка S12 не используется.
При переходе к беспроводному варианту связи, разъём XT12 не устанавливается, а резисторы R16, R17 и конденсатор C1 следует удалить.
На плату добавлен также выключатель питания SA3. Светодиода включения питания не предусмотрено. Потому, что при включении должны засветиться несколько светодиодов, отображающих режимы работы.
8.3.3. Сборочный чертёж платы блока управления
Сборочный чертёж платы управления со стороны монтажа показан на рисунке 58, со стороны пайки - на рисунке 59. На рисунке 60 показана разводка платы.
Рис. 58. Сборочный чертёж платы управления. Сторона монтажа.
Рис. 59. Сборочный чертёж платы управления. Сторона пайки.
Рис. 60. Сторона пайки. Разводка связей.
Для связи платы с Arduino применены угловые штыри. Поэтому они припаиваются к ламелям на плате управления, а не впаиваются в отверстия. На рисунке 60 видно, как к ламелям припаиваются угловые штыревые разъёмы. Для точного позиционирования, при распайке разъёмов, они должны быть вставлены в соответствующие розетки платы Arduino.
Плата разрабатывалась под корпус, который есть в наличии. Места в нём не много, поэтому пришлось поставить пять длинных перемычек. По этой же причине светодиоды расположены не рядом с соответствующими кнопками, а рядом с разъёмами Arduino, к которым они подключаются. Но кнопки и светодиоды расположены напротив и выделены в группы, что упрощает идентификацию.
Применены SMD – резисторы типоразмера 2012. Конденсаторы C1 и С2 – типоразмера 1608.
Транзисторы – в корпусе SOT-23.
Отверстие около разъёма XT7 просверлено напротив SMD-резистора, установленного на экране, чтобы плата в него не упиралась. У разъёма XT7 возможно использовать только четыре старших контакта, поскольку напротив младших контактов на плате экрана установлен транзистор. По этой же причине сигналы L1 – L4 пришлось разнести на два разъёма - XT5 и XT7.
8.3.4. Внешний вид платы управления
Внешний вид стороны монтажа показан на рисунке 61, стороны пайки – на рисунке 62.
Рис. 61. Плата управления в сборе. Сторона монтажа.
Рис. 62. Плата управления в сборе. Сторона пайки.
На рисунке 63 показано положение платы и Ардуино при распайке контактов. На рисунке 64 – размещение платы в Ардуино.
Рис. 63. Распайка контактов.
Рис. 64. Размещение платы в Ардуино.
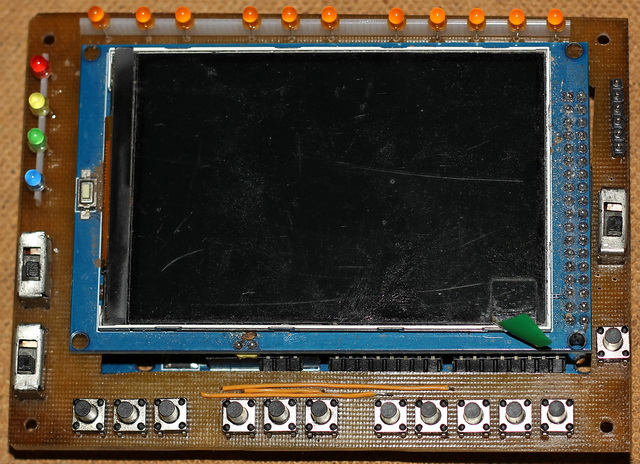
На рисунке 65 показан внешний вид Ардуино со вставленным экраном и платой управления, на рисунке 66 - размещение блока управления в корпусе.
Рис. 65. Ардуино со вставленными платой управления и экраном.
Рис. 66. Блок управления в корпусе.
На этом разработка «железа» закончена. Далее развитие изделия зависит только от программирования.
Хорошо читабельные схемы и сборочные чертежи приведены в pdf. файле здесь.
Pdf-файлы для изготовления печатных плат методом Лазерно-Утюжной Технологии (ЛУТ) здесь. Перед выводом на печать необходимо в настройках установить Текущую страницу и Реальный размер.
=В.С.= 17 мая 2022 г.
9. Переходной проводной вариант, или "синица в руках"
При переходе к беспроводному варианту получился очень неплохой вариант с проводной связью между блоком управления и исполнительным устройством.
Отличие от первого варианта с проводной связью заключается в том, что используется новый блок управления и отсутствуют органы управления на приёмнике и излучателе, за исключением выключателя питания. Всё управляется с блока управления.
9.1. Схема соединений блока управления с исполнительным устройством
Схема блока управления переходного варианта приведена на рисунке 66.
Рис. 66. Схема блока управления переходного варианта.
В этом варианте, для отвязки сигналов L1 – L4 от светодиодов, использованы последние свободные четыре контакта Ардуино на разъёме XT7. Кроме того, сигналы SCL и SDA, предназначенные для обмена с WeMos, идут на плату приёмника и используются для записи сигналов управления исполнительным устройством непосредственно в сдвигающий регистр платы расширения приёмника.
Схема исполнительного устройства показана на рисунке 67.
Рис. 67. Схема исполнительного устройства переходного варианта.
Все провода жгута, приходящего от блока управления, за исключением напряжения питания +12V, соединяются с соответствующими выводами розетки, предназначенной для подключения WeMos.
Связь платы расширения приёмника с излучателем осуществляется жгутом проводов, через разъём XT4.
9.2. Внешний вид
На рисунке 68 показано соединение жгутом блока управления и платы расширения приёмника.
Рис. 68. Соединение блока управления и платы расширения.
Снимок специально сделан без экрана, чтобы было видно подключение выводов L1 – L4 к разъёму XT7 Ардуино.
На рисунке 69 показано соединение платы расширения приёмника с платой расширения излучателя, на рисунке 70 – соединение всех частей изделия.
Рис. 69. Соединение и плат расширения приёмника и излучателя.
На рисунке 69 можно видеть, как и из чего сделаны розетки и вилки для соединения платы расширения приёмника с платой WeMos, и, в данном случае, со жгутом проводов от блока управления.
Розетки выполнены из панелек с круглыми контактами для микросхем. Вилки – из выводов розеток PLS с длинными тонкими выводами. Они с небольшим усилием входят в панельки и обеспечивают хороший контакт. Такие розетки идут в комплекте с платами WeMos.
Все соединения проводов с розетками и вилками залиты термоклеем. Опыт недолгой эксплуатации первых образцов показал, что если этого не делать, провода через некоторое время начинают отваливаться.
На рисунке 70 изделие электрически полностью собрано. Осталось собрать его конструктивно.
Рис. 70. Соединение всех узлов изделия.
Законченный вид второго проводного варианта показан на рисунке 71. Винт на правом краю излучателя служит для крепления крышки, которую необходимо снимать при замене аккумуляторов.
Рис. 71. Законченный вид второго проводного варианта.
На рисунке 72 показан вид изделия в рабочем положении. Вместо пробки в трубу приёмника вставляется труба диаметром 32 мм, которая служит ручкой при переноске и измерениях, позволяющей оператору работать в полный рост.
Рис. 72. Вид изделия в рабочем положении.
Скетч прилагается в виде отдельного текстового файла «Эхолот_вар_2». Необходимо перед загрузкой изменить расширение «.txt» на «.ino».
=В.С.= 2 июня 2022 г.
10. Результаты испытаний проводного варианта.
Испытания проводились в июле на юге страны. Июнь был засушливым, земля вся в трещинах до 5 см. Любые попытки измерения в таком грунте оказались безрезультатными. Максимально, что удаётся определить, - это толщина глыбы засохшего грунта.
В то же время толщина и глубина бетонных блоков (3,2 м), которыми обложен канал для оттока воды, и шаг, с которым установлена арматура в блоках, определяются на самых грубых уставках чувствительности.
Хорошо работает в скальных грунтах. В слежавшемся песчаном грунте обнаруживались уплотнения или полости на глубине до 5 м.
Обнаружился серьёзный недостаток. При направлении в небо, на уставках высокой чувствительности прибор показывал наличие отражённого сигнала. Оказалось, что в этих режимах он улавливает звон излучателя, который продолжается некоторое время после окончания импульса. Этот недостаток устранён программно. Просто такие импульсы маскируются. Снять маскирование можно нажатием кнопки текущего канала. Это позволяет оценить глубину маскирования по длительности первого (ложного) импульса, который появляется при снятии маскирования.
Новый скетч «Exolot_Var_2_2_3» прилагается.
Для снятия профиля сканируемого объекта проводной вариант оказался малопригодным. Через каждый шаг делать записи в тетрадку при большом количестве шагов нереально. Тем более, если между поверхностью и сканируемым объектом вдруг появляется камень в грунте.
Поэтому дальнейшее развитие должно автоматизировать процесс записи массива измерений и их дальнейшую обработку. Этим и займёмся.
=В.С.= 29 июля 2022 г
^ ^ ^
11. Вариант с беспроводной связью между блоком управления и исполнительным устройством
 За основу взят предыдущий проводной вариант «Exolot_Var_2_2_3» со всеми его недостатками. Ардуино занимается только выводом на экран полученной информации, обработкой кнопок управления и светодиодной индикации, формирует регистры управления для Исполнительного Устройства (ISP) и отправляет их на свзяанную с ним WeMos, которая передаёт их на WeMos, связанную с ISP. WeMos, связанная с ISP, передаёт на ISP управляющий байт и запускающий импульс и сразу приступает к обработке сигналов от приёмника. Результаты обработки в обратном порядке передаются на Ардуино. За основу взят предыдущий проводной вариант «Exolot_Var_2_2_3» со всеми его недостатками. Ардуино занимается только выводом на экран полученной информации, обработкой кнопок управления и светодиодной индикации, формирует регистры управления для Исполнительного Устройства (ISP) и отправляет их на свзяанную с ним WeMos, которая передаёт их на WeMos, связанную с ISP. WeMos, связанная с ISP, передаёт на ISP управляющий байт и запускающий импульс и сразу приступает к обработке сигналов от приёмника. Результаты обработки в обратном порядке передаются на Ардуино.
На дальность действия не проверял, но в пределах комнаты (6 м) связь устойчивая. Отличий в работе от проводного варианта не замечено. Кроме удобства пользования, конечно.
Недостаток - ток, потребляемый от аккумуляторных батарей, увеличился до 240 мА Устройством Управления и до 140 мА Исполнительным Устройством. Реально Устройство Управления работает от одной зарядки 4 - 6 часов, а Исполнительное Устройство 7 - 10 часов, в зависимости от ёмкости аккумуляторов.
В процессе программирования была проведена доработка схемы изделия:
1. Для возможности вывода (при отладке программы) информации в последовательный порт, пришлось освободить выводы 0 и 1 последовательного порта Ардуино, для чего контакты этих выводов с платы управления были обрезаны. В свободные разъёмы контактов 14 и 15 Ардуино вставлены два угловых контакта и проводами установлены связи: Контакт 0 платы управления - контакт 15 платы Ардуино и контакт 1 платы управления - контакт 14 платы Ардуино.
Как это выглядит в натуре, показано на рисунке 73.
2. Вследствие того, что при связи по протоколу I2C WeMos и Ардуино, на сегодня Ардуино может быть только ведомым (slave) (из-за отсутствия вменяемой библиотеки), пришлось отдельным проводом соединить свободный контакт 16 Ардуино с выводом D6 WeMos через делитель - преобразователь уровня 2,4 кОм / 4,7 кОм. По этому проводу Ардуино передаёт WeMos сигнал готовности, по которому WeMos Запрашивает у Ардуино и получает данные для передачи на ISP.
Внешний вид доработки показан на рисунке 74.
Надо признать, что обе доработки – чисто субъективный фактор. Когда я рисовал схемы, имел смутное представление о программировании Ардуино. Даже не знал, что ход программы можно наблюдать на мониторе компьютера. А когда встал вопрос об отсутствии адекватной библиотеки, между перспективой изучать программирование, чтобы потом забыть его навсегда, или поставить проводок, выбрал второе.
Все мои программы – сплошной плагиат из Интернета. Но каждый программист может сделать их лучше.
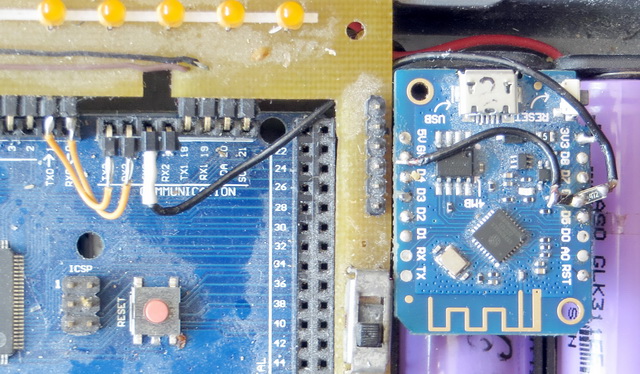
Рис. 73. Вид доработки 1.
Рис. 72. Вид доработки 2.
Скетч прилагается в двух вариантах, по три текстовых файла в каждом, для каждого субъекта изделия:
- «_вар_3.2», в котором строки вывода на монитор (Serial.) не закомментированы. Это удобно для отладки программы. Конечно, их может закомментировать каждый сам, но вот я в процессе комментирования внёс ошибку и долго потом её искал. Поэтому прилагаю вариант без ошибок.
- «_вар_3.3», в котором строки вывода на монитор (Serial.) закомментированы.
Необходимо перед загрузкой изменить расширение «.txt» на «.ino».
Первый вариант содержит:
WyFy_Ard_Var_3_2.txt скетч для Ардуино;
WyFy_WeMos_Ard_Var_3_2.txt для WeMos, связанной с Ардуино;
WyFy_WeMos_Isp_Var_3_2.txt для WeMos, связанной с излучателем.
Второй вариант содержит:
WyFy_Ard_Var_3_3.txt скетч для Ардуино;
WyFy_WeMos_Ard_Var_3_3.txt для WeMos, связанной с Ардуино;
WyFy_WeMos_Isp_Var_3_3.txt для WeMos, связанной с излучателем.
=В.С.= 1 сентября 2022 г
12. Вариант с беспроводной связью между блоком управления и исполнительным устройством, переходной к варианту с записью на карту памяти.
Для перехода к варианту с записью в карту памяти пришлось пересмотреть способ вывода информации на экран. Если раньше на экран практически выводились осциллограммы импульсов, в которых высокий и низкий уровни обозначались разными цветами, то теперь выводятся только точки, показывающие расстояние до места отражения сигнала. Это сделано для возможности вывода на одну линию нескольких каналов. Кроме того, запись в карту памяти предполагает возможность в дальнейшем автоматической обработки записанной информации. Банк данных расстояния до объектов, полученных в различных режимах, упрощает их обработку.
Предполагается, что запись на карту памяти будет возможна только в автоматическом режиме, когда каналы перебираются автоматически. В конечном итоге предполагается автоматически записывать данные от всех каналов при всех возможных значениях коэффициента усиления. Экспериментально установлено, что целесообразно оптимальную длительность пачки импульсов и напряжение на излучателе установить самостоятельно, перед записью в память. Причём эти параметры тоже будут записаны. Можно при замере в текущей точке изменять эти параметры и сделать несколько записей. При чтении эти данные можно будет рассортировать и обработать отдельно.
В текущем варианте в автоматическом режиме в Ардуино сначала записываются данные от всех четырёх каналов, после чего начинается их вывод на экран на одну вертикальную линию.
Скетч прилагается в виде трёх текстовых файлов :
WyFy_Ard_Var_4_0.txt скетч для Ардуино;
WyFy_WeMos_Ard_Var_4_0.txt для WeMos, связанной с Ардуино;
WyFy_WeMos_Isp_Var_4_0.txt для WeMos, связанной с излучателем.
Необходимо перед загрузкой изменить расширение «.txt» на «.ino».
=В.С.= 11 сентября 2022 г
13. Вариант с беспроводной связью между блоком управления и исполнительным устройством, с записью на карту памяти.
Наконец, достигнута конечная цель первого этапа конструирования. Следующий этап потребует дополнительного оборудования.
В текущем варианте в процессе обследования объекта головка прибора устанавливается на грунт, по картинке на экране убеждаемся, что есть отражения и нажимаем правую кнопку. Прибор автоматически поочерёдно производит измерения для всех четырёх каналов при трёх возможных коэффициентах усиления. То есть всего 12 вариантов. Все результаты записываются на карту памяти в один файл. Длительность импульсов и напряжение на излучателе устанавливаются вручную перед началом измерений. Если их тоже перебирать, получается 72 варианта. Это ощутимо затягивает время записи на карту памяти, поскольку она работает существенно медленнее, чем остальное оборудование. А какие варианты длительности пачки импульсов и напряжения на излучателе установить, зависит в основном от состояния грунта и легко определяется путём нескольких пробных замеров.
Все результаты измерений для одной точки записываются в один файл. Так что, сколько точек, столько и файлов. На сегодня количество файлов ограничено числом 999. Потому, что для записи их номера на экране выделено три знака.
Все файлы для одного прохода записываются в один каталог (папку). Количество папок по той же причине ограничено числом 999.
Результаты работы можно в любое время вывести на экран и в спокойной обстановке посмотреть профиль (вертикальное сечение) обследованного объекта.
Имеется возможность вывода одного или нескольких, или всех вместе каналов при выбранном коэффициенте усиления или при всех коэффициентах усиления одновременно.
Глубина просмотра по вертикали (глубина сканирования) устанавливается при просмотре вручную, от 5 до 80 м. Показываются только отражения, лежащие в установленных пределах.
Поддерживаются карты SD или микроSD с адаптером, ёмкостью до 32 Гбайт.
Для того, чтобы переписать файлы на компьютер, карту памяти необходимо извлечь. Передача по USB не предусмотрена. Решил, что ради этого утяжелять и без того огромную для Ардуино программу не имеет смысла.
Скетч прилагается в виде трёх текстовых файлов :
WyFy_Ard_Var_5_0.txt скетч для Ардуино;
WyFy_WeMos_Ard_Var_5_0.txt для WeMos, связанной с Ардуино;
WyFy_WeMos_Isp_Var_5_0.txt для WeMos, связанной с излучателем.
Необходимо перед загрузкой изменить расширение «.txt» на «.ino».
=В.С.= 14 октября 2022 г.
14. Вариант с проводной связью между блоком управления и исполнительным устройством, с записью на карту памяти.
Проводной вариант отличается от беспроводного только наличием жгута проводов, связывающих Устройство управления с Исполнительным устройством.
На практике жгут не сильно мешает работе. Зато когда я уронил Устройство управления над глубоким водоёмом, сразу оценил преимущество проводного варианта.
Проводной вариант потребляет примерно в два раза меньше энергии и батарей точно хватает на день работы.
На текущем этапе проводной вариант лично мне больше нравится. Но это его конечная точка развития. Потенциал развития имеет беспроводной вариант.
Для проводного варианта пришлось сделать небольшую доработку. Поскольку в проводном варианте вывод 68 аналогового входа, к которому подключена кнопка «Экран», занят измерением напряжения питания Исполнительного устройства, выводы кнопки пришлось отрезать от проводника, соединённого с выводом 68, связь цепи 12 В восстановить перемычкой, а освободившийся вывод кнопки «Экран» соединить проводом с выводом 49 Ардуино методом пайки.
Скетч прилагается в виде отдельного текстового файла
«Exolot_Var_6_0.txt».
Необходимо перед загрузкой изменить расширение «.txt» на «.ino».
=В.С.= 21 октября 2022 г.
На этом статью заканчиваем. Она получилась слишком большой, чтобы продолжать здесь писать дальше.
Тем не менее, продолжение необходимо. Например, без описания действий с кнопками, работать с прибором практически невозможно. Все дополнения и продолжение работы будут описаны в других статьях.
Руководство по эксплуатации описанного эхолота лежит здесь.
Окончательный вариант эхолота описан в следующей статье.
=В.С.= 21 октября 2022 г.
Скетчи для различных вариантов.
Их необходимо скачать (то есть, не открывать в браузере, а "сохранить как"), и перед загрузкой в Ардуино изменить расширение «.txt» на «.ino».
- «Эхолот_вар1» 17.05.2022 г.
- «Эхолот_вар_2» 02.06.2022 г.
- «Эхолот_вар_2_2_3» 29.07.2022 г.
4.1 Первый вариант 1 сентября 2022 г:
WyFy_Ard_Var_3_2.txt скетч для Ардуино;
WyFy_WeMos_Ard_Var_3_2.txt для WeMos, связанной с Ардуино;
WyFy_WeMos_Isp_Var_3_2.txt для WeMos, связанной с излучателем.
4.2 Второй вариант 1 сентября 2022 г:
WyFy_Ard_Var_3_3.txt скетч для Ардуино;
WyFy_WeMos_Ard_Var_3_3.txt для WeMos, связанной с Ардуино;
WyFy_WeMos_Isp_Var_3_3.txt для WeMos, связанной с излучателем.
5 «Эхолот_вар_4_0» 11 сентября 2022 г:
WyFy_Ard_Var_4_0.txt скетч для Ардуино;
WyFy_WeMos_Ard_Var_4_0.txt для WeMos, связанной с Ардуино;
WyFy_WeMos_Isp_Var_4_0.txt для WeMos, связанной с излучателем.
6 «Эхолот_вар_5_0» 14 октября 2022 г:
WyFy_Ard_Var_5_0.txt скетч для Ардуино;
WyFy_WeMos_Ard_Var_5_0.txt для WeMos, связанной с Ардуино;
WyFy_WeMos_Isp_Var_5_0.txt для WeMos, связанной с излучателем.
7 «Эхолот_вар_6_0» 21 октября 2022 г:
«Exolot_Var_6_0.txt».
|